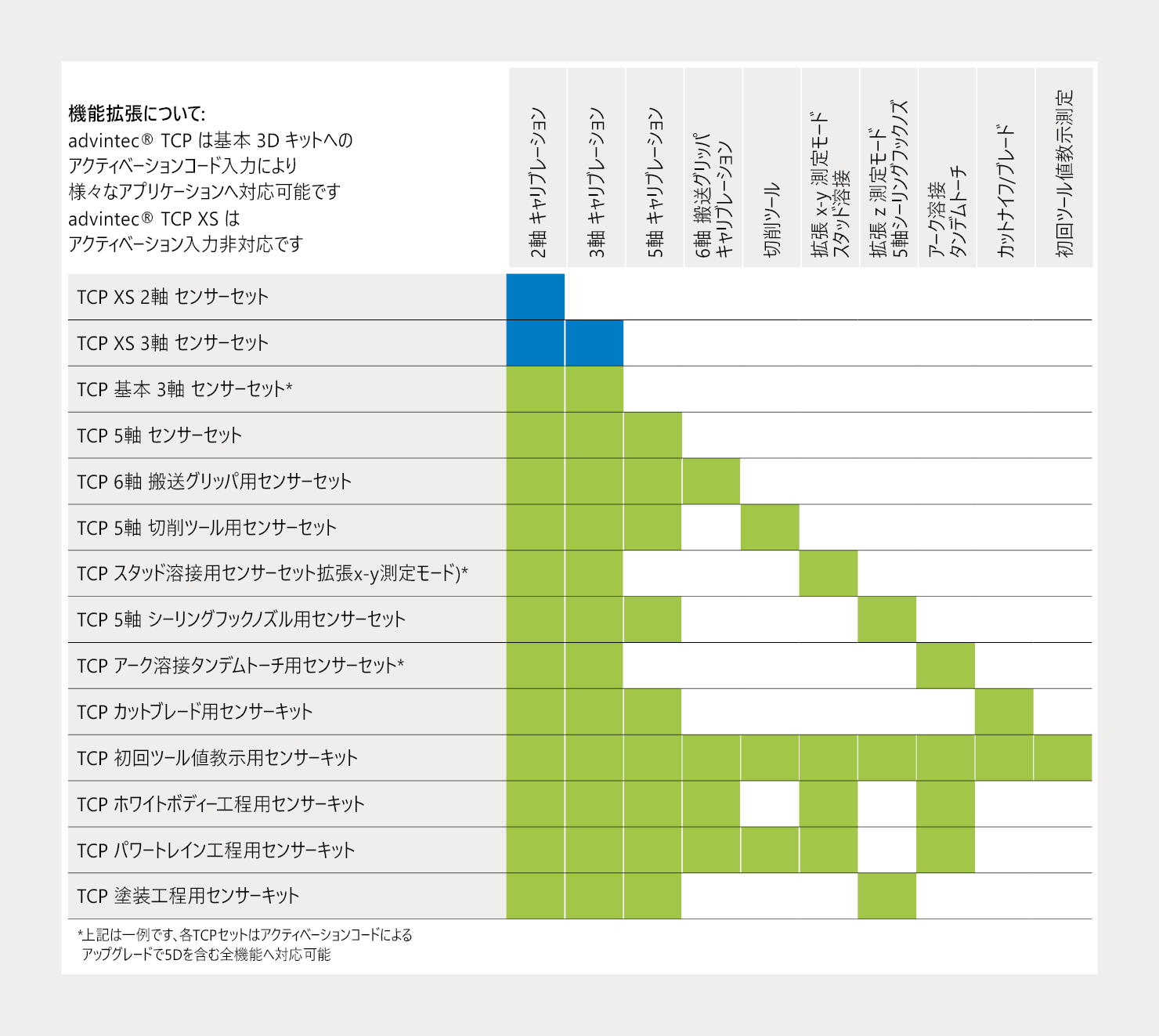
BizLink advintec TCP 工具測定
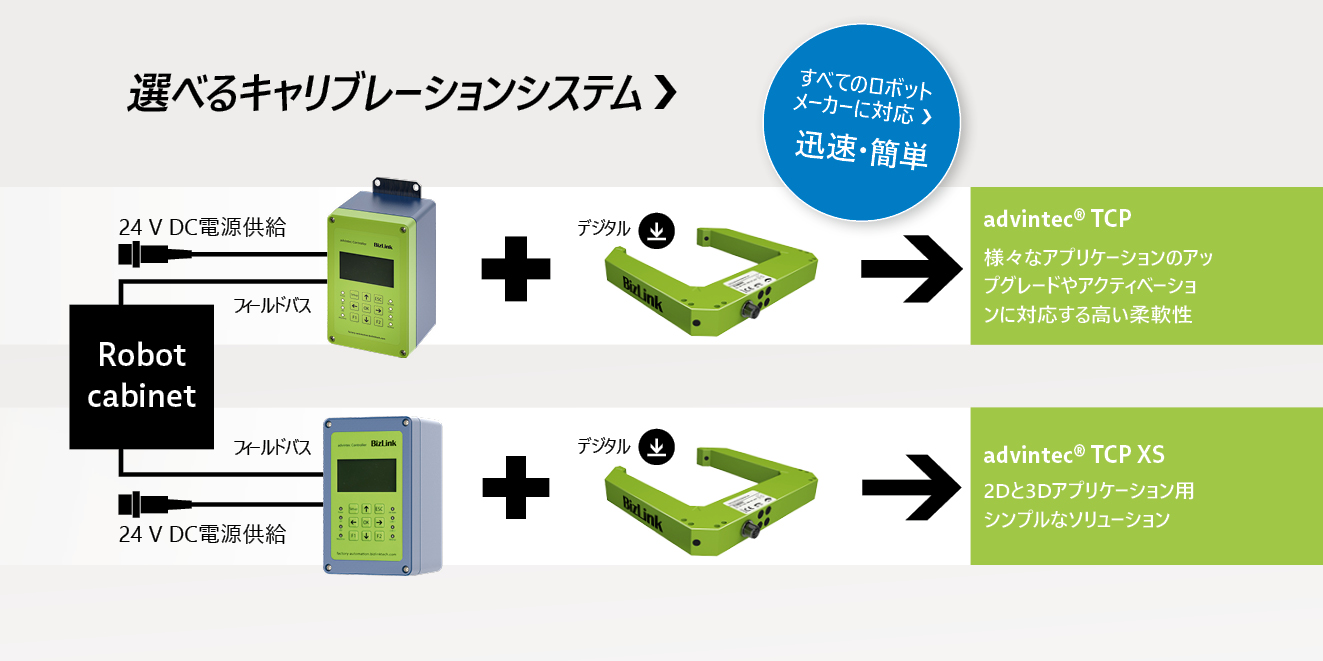
あらゆるロボット銘柄に適用可能。
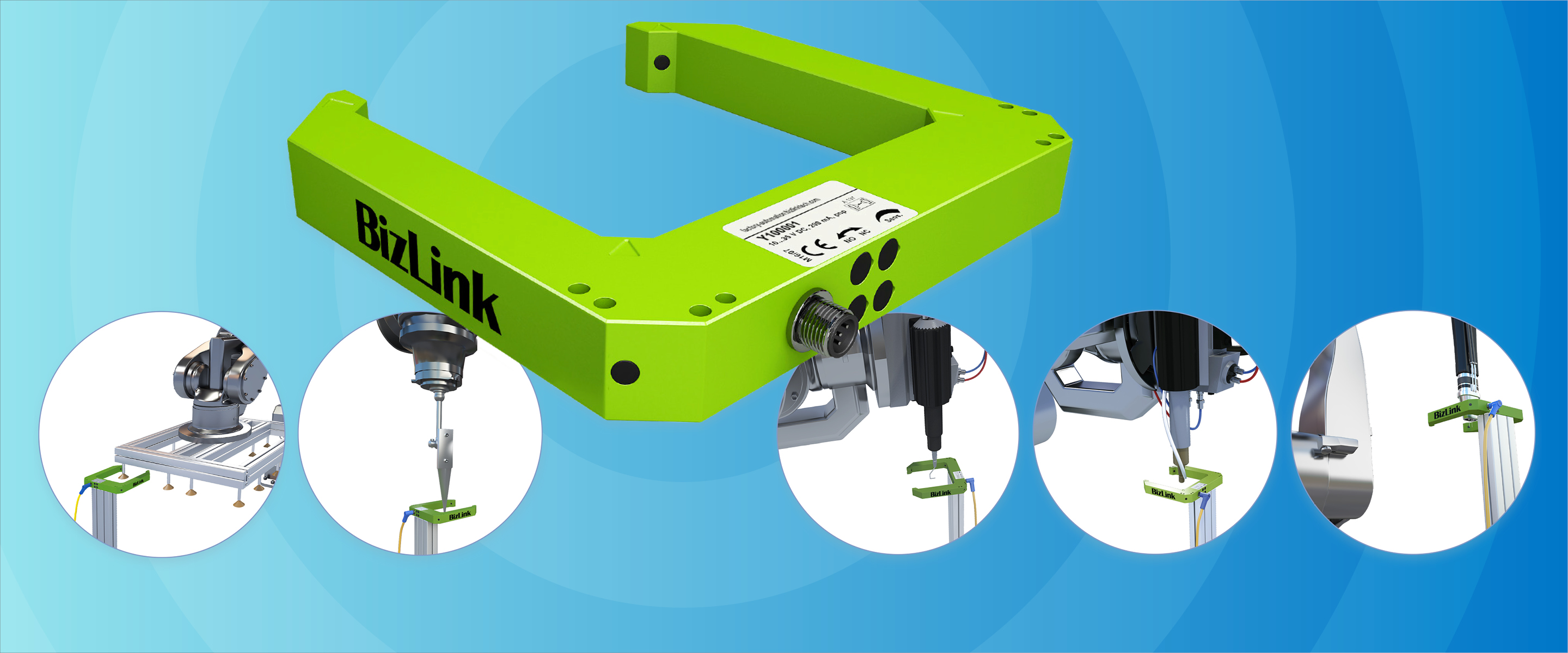
BizLink advintec TCP - 最高 6 次元までのロボット工具とフィクスチャの計算と校正
課題
溶接トーチやフライス盤などのロボット工具に対して、フィクスチャに適した正しい動作位置を継続的に確保すること。
ソリューション
BizLink advintec TCP 工具校正システムは、最高 6 次元までの工具またはフィクスチャの校正をコンピュータにより実施します。計測された偏差に基づいてロボットプログラムが自動的に補正され、工具は常に正しい位置で確実に動作します。BizLink advintec TCP は、あらゆるタイプのロボットおよびロボット工具に使用できる高精度の校正システムで、特定メーカーに依存しません。
お客様にとっての利点
進行中の製造過程であっても、補正が直接的かつ自動的に反映されます。
サイズ / 寸法

3 つのサイズで利用可能 赤外線 (内部寸法):
- 120 mm x 120 mm
- 240 mm x 240 mm
- 320 mm 円形
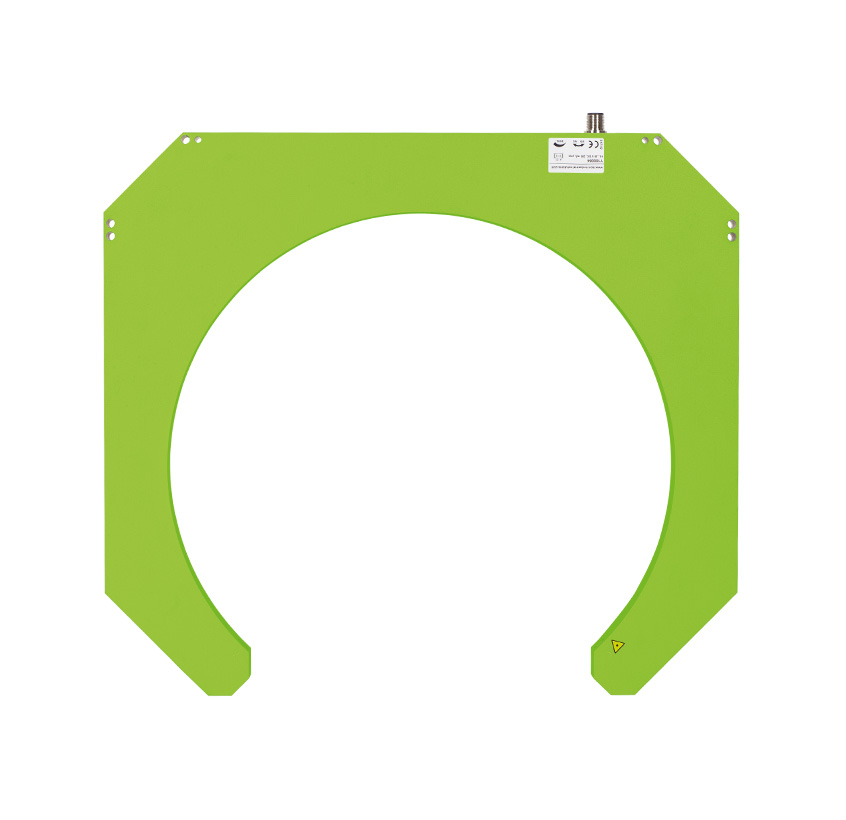
BizLink advintec TCP高精度レーザセンサ - 2つのサイズで利用可能 (内部寸法):
- 120 mm x 120 mm
- 320 mm 円形
BizLink advintec TCP XS センサーは 120 mm x 120 mm の赤外線のみ利用可能

6 次元
A = Z 軸の回りを回転
B = Y 軸の回りを回転
C = X 軸の回りを回転
利点一覧
- ロボット工具とフィクスチャの自動絶対計算
- 自動始動と使いやすさ
- 小フットプリントによる生産ラインでの統合の簡素化
- 2 つのサイズで利用可能な堅牢なセンサ
- マルチセンサシステム (追加センサの接続が可能)
- コスト削減
- 故障部品の発生を防止
- 廃棄や再加工の低減
- 短い設置時間
- 校正システムのロボットコントローラへの接続、すなわち校正手順は評価ユニットで行われ、補正値をロボットコントローラへ伝送します
- 高い処理信頼性
- 追加 PC は不要
- 校正データのロギング
- いつでもデータ評価可能
- 損摩耗および工具交換による軌道の自動補正
- 100% の品質保証
技術データ
| センサタイプ | 赤外線 880nm 2 チャンネル、パルスレート 2kHz |
インターフェイス | シリアルまたはフィールドバス (DeviceNet、PROFIBUS、PROFINET など) |
校正精度 | 0.02 mm |
標準校正時間 * | 完全な 2D 校正 3 秒 完全な 3 D 校正 6 秒 完全な 5D 校正 9 秒 完全な 6D 校正 15 秒 |
保護等級 | IP67 |
不潔環境 | 対応 |
ケーシング | アルミニウム |
次元 | 2 または 3 並進 5 (3 並進 + 2 回転) 6 (3 並進 + 3 回転) |
工具データの自動補正 | 対応 |
用途分野 | アーク溶接、スタッド溶接、スポット溶接、レーザ切断、TIG 溶接、接着、フライス加工、ドリル加工、研磨加工など 6D:グリッパ校正、フィクスチャの校正、パワートレイン応用製品、 高精度応用製品 |
CE マーク | 取得済み |
動作電圧 | 10 ~ 34 V DC |
接続 | IBS コネクタ、5 ピン、PE アドバンスコネクタ |
* 校正時間は条件によって異なることがあります
BizLink advintec TCP-3D の生産プロセスへの統合
- 容易
- ロボットプログラミングの手間を最小限まで低減
- 迅速な設置
- 簡単なセットアップ
- 校正データのロギング: 常時定期的なデータ評価が可能
- 追加 PC は不要

アドビンテック TCP-3D のロボット溶接セルへの統合
用途
あらゆる回転対称工具に適用可能
弊社は特殊用途用にオプションの技術パッケージを提供します
TCP ソフトウェア フライス加工
このソフトウェアアドオンは、フライス加工アプリケーション用に開発され、フライス工具およびドリルビットなどの刃を備えた回転工具の校正を行えます。このアドオンは工具校正に加え、工具破損の検出機能を備えています。
TCP ソフトウェア スタッド溶接
このソフトウェアアドオンは、支持部を備えたスタッド溶接工具の校正用に開発されました。このアドオンはスタッドまたはチャックの校正を円滑化し、またチャックと支持部を識別できます。
TCP ソフトウェア シーラントノズル (フックノズル)
このアドオンは、縁部のシーリングに適した特殊形状 (フックノズル) を持つシーラントノズルの校正用に開発されました。
TCP ソフトウェア タンデムトーチ
両方の溶接ワイヤを同時に校正できます。







TCP ソフトウェア 切断工具 / 刃
このアドオンは、デバリングナイフ、超音波ナイフなどの刃の 6D 校正を可能にします。切断方向の正確な校正。



モバイル校正ケース
弊社は時間のかかるプラント拡張時のプログラム修正や新しい工具の設置作業を避けるため、自動化された工程の一環として絶対値初期校正を提供しています。これは事後のティーチインを最小限に抑えます。その工程には、工具データを生成するために工具を光電障壁の中心に移動させることが含まれます。公差区間(工具の移動が許可される区間)と校正の開始点のみが、システム内で教示される必要があります。完了後、ロボットは設定された公差区間の範囲で工具を移動させ、提供されたプログラムの支援によって自動的に自身を校正します。その利点には高い水準の精度、従来の手動校正で発生する人為ミスを解消可能な自動化、標準化された再現可能な手順が含まれます。それに加えて、初期校正は迅速かつ費用効率的です。
未知の工具およびフィクスチャ(TCP&ベース)の初期校正に対応したモバイル校正ケース
弊社のモバイル校正ケースによって、未知の工具およびフィクスチャに対応した柔軟なモバイル校正が可能になりました。新生産ライン設置時の使用に最適です。
校正ケースの構成:
- 高精度レーザセンサ120 mm x 120 mm
- 赤外線センサ240 mm x 240 mm
- TCPコントローラ
- ケーブルセット
- 電源装置
- モバイルセンサの安全な装着用の三脚
- ロボット制御用データインターフェイス
- ソフトウェアパッケージ
- 始動用文書
User login
Enter your username and password here in order to log in on the website