BizLink advintec TCP工具测量
适用于所有机器人品牌
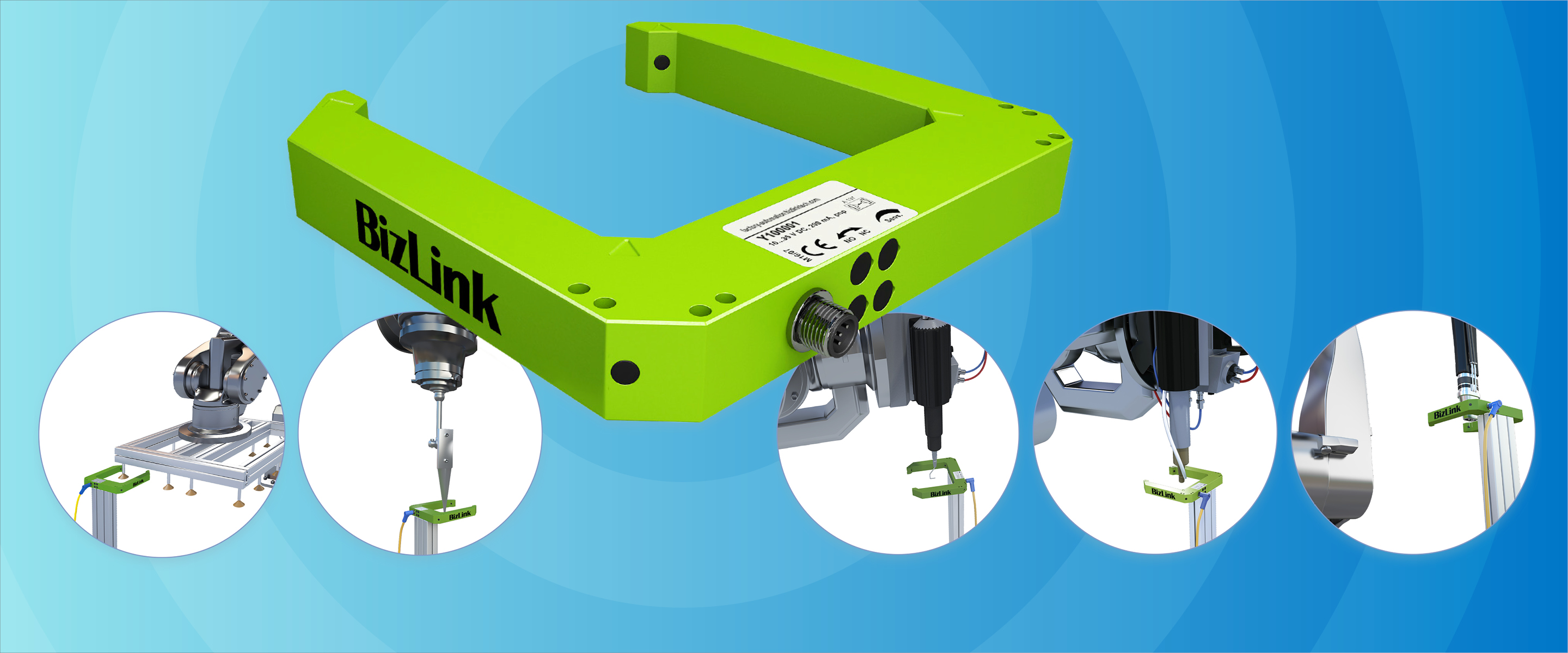
BizLink advintec TCP - 可在多达六个维度上计算和校准机器人工具和夹具
挑战
持续确保机器人工具(如焊枪和铣刀)和夹具处于正确的工作位置
解决方案
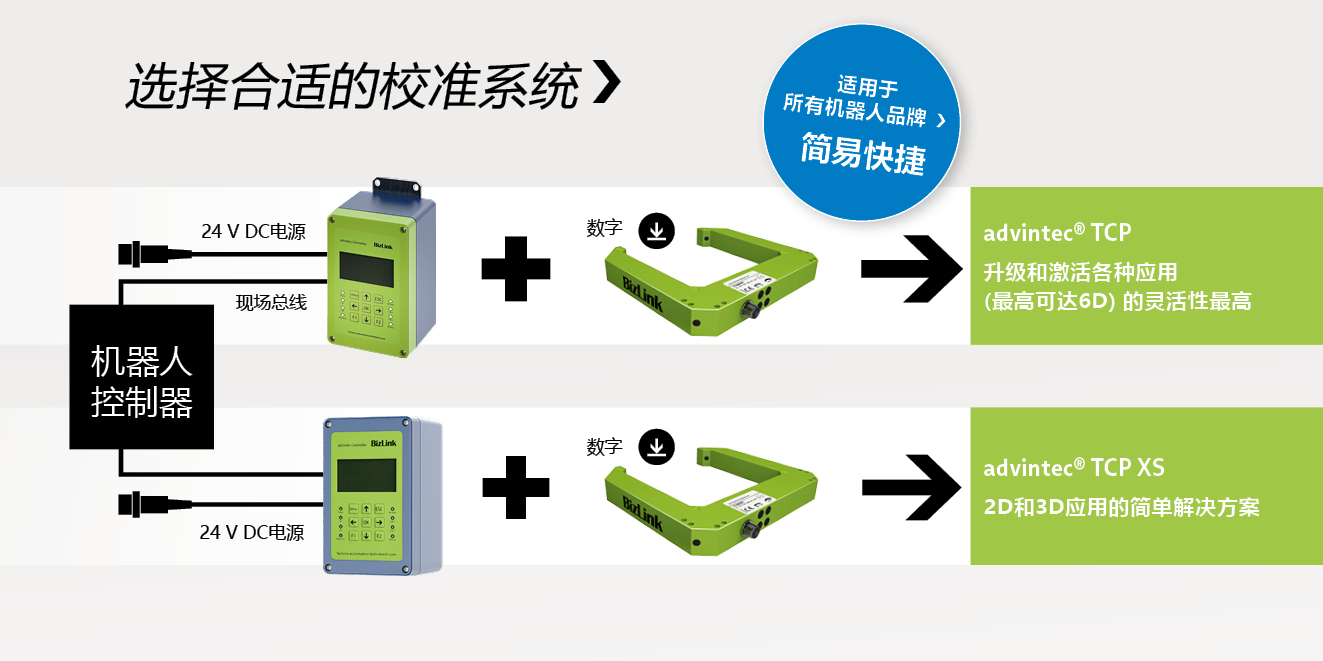
BizLink advintec TCP 工具校准系统在生产过程中可以从多达6个维度进行工具和夹具的电子校准。通过测量变化,轨迹会自动更正,以此来保证工具总是运行在正确的位置。BizLink advintec TCP 是一种高精度校准系统,可用于各种机器人类型以及大多数机器人工具,从而使其不依赖于特定的制造商。
优点
在正在进行的生产过程中直接自动校正。
尺寸及维度

BizLink advintec TCP 红外线传感器,三种可选尺寸(内尺寸):
- 120 mm x 120 mm
- 240 mm x 240 mm
- 320 mm 圆形
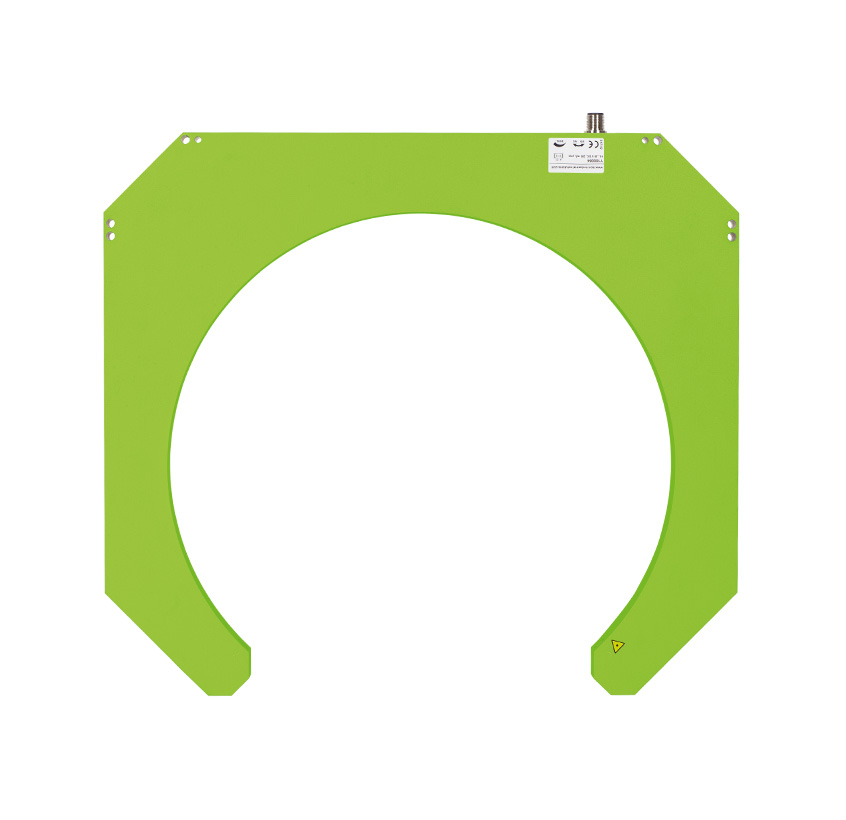
BizLink advintec TCP 精密激光传感器, 有两种尺寸可选 (内尺寸):
- 120 mm x 120 mm
- 320 mm 圆形
BizLink advintec TCP XS传感器仅有120 mm x 120 mm红外规格。

六个维度
A = 绕 Z 轴旋转
B = 绕 Y 轴旋转
C = 绕 X 轴旋转
优势
- 自动化工具和夹具的自动绝对计算
- 自动调试,操作简单
- 体积小,可简单集成至生产线
- 坚实的传感器,有三种尺寸可选
- 多传感器系统(可连接额外的传感器)
- 降低成本
- 预防产生缺陷产品
- 降低报废和返工
- 较短的集成时间
- 连接校准系统和机器人控制器,即校准程序出现在计算单元中,并将校准值传输至计算机控制器,
- 工艺可靠性高
- 无需额外的 PC
- 记录校准数据
- 可随时进行数据评估
- 自动校正因磨损或工具替换影响的运动轨迹
- 100% 质量保证
技术数据
传感器类型 | 2 通道红外 880 nm,脉冲频率为 2kHz |
端口 | 串行或现场总线(DeviceNet、Profibus、Profinet 等) |
校准精度 | 0.02 mm |
校准* | 3 秒完成2D 校准 6 秒完成3D 校准 9 秒完成5D 校准 15 秒完成6D 校准 |
防护等级 | IP67 |
污浊环境下工作 | 是 |
外壳 | 铝 |
维度 | 2 或 3 次平移 5(3次平移 + 2次旋转) 6(3次平移+ 3次旋转) |
自动修正刀具数据 | 是 |
应用领域 | 电弧焊、螺柱焊、点焊、激光焊、氩弧焊、涂胶、铣削、钻孔、磨削等。 6D:抓具校准、固定夹具校准、动力总成应用、高精度应用 |
CE 标志 | 是 |
工作电压 | 10–34 V DC |
| 连接 | IBS 连接器,5 针,PE 提前连接 |
* 校准时间可能因条件而异
将 BizLink advintec TCP-3D 集成到生产流程
- 操作简单
- 将机器人编程降低到最小限度
- 安装快速
- 易于设置
- 记录校准数据:可随时做定期数据评估
- 无需额外的电脑

BizLink advintec TCP-3D 系统安装到机器人焊接单元中
供货范围
- 1) TCP 传感器
- 3) TCP 控制器
- 电缆组件 (5m):电源线、传感器电缆、总线电缆组
- 机器人程序示例
- 通过网络下载文档
不包括:
2) 喷嘴清洁器, 4) 机器人控制器,5) 机器人
应用
适用于所有旋转对称工具
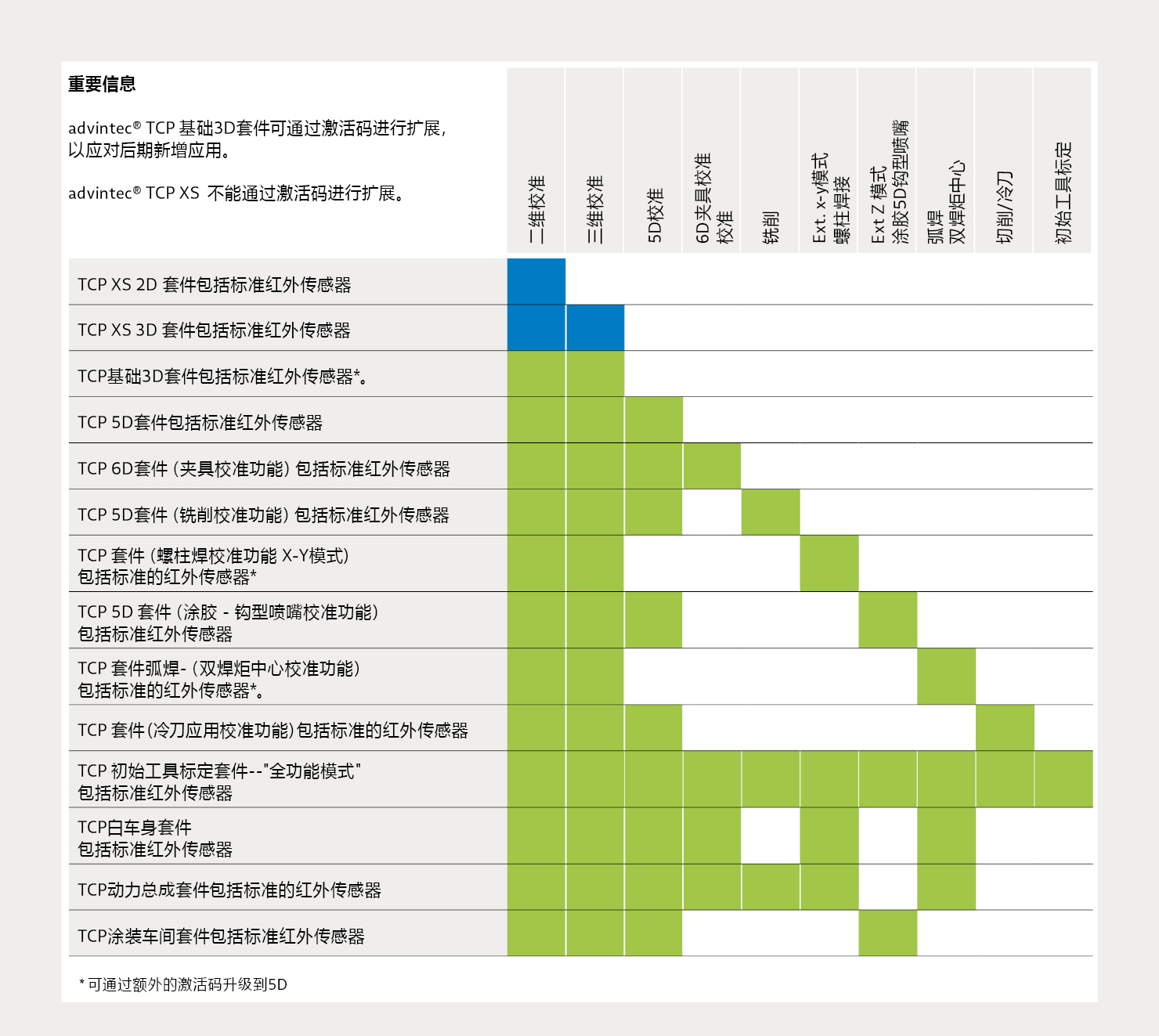
对于特殊应用,我们为您提供可选配的技术包。
TCP 软件铣削
此软件插件是专门为铣削应用而开发的,可用于对铣削工具和钻头等带切削刃的旋转工具进行校准。除工具校准外,它还包括工具破损检测功能。
TCP 软件螺柱焊
此软件插件是专为用脚校准螺柱焊工具而开发的。它便于校准螺柱或夹头,而软件可以区分夹头和脚。
TCP 软件密封剂喷嘴(钩形喷嘴)
此软件插件是专门为下摆密封的具有特殊几何形状的密封剂喷嘴(钩形喷嘴)的校准而设计的。
TCP 软件串联焊枪
可同时校准两根焊丝。







TCP 软件切割工具/刀片
可对倒角刀和超声刀等切割刀片进行 6D 校准。精确校准切割方向。



移动校准箱
为了避免在工厂扩建或新工具安装工作期间修改程序耗时耗力,我们提供绝对初始校准服务,作为自动化过程的一部分。这样就可以将后续调教需求降至最低。该过程包括将工具移动到光电屏障的中心,以生成工具数据。此系统只需要调教公差范围(允许工具移动的区间)和校准的起点。完成上述操作后,机器人将在定义的公差范围内移动工具,并借助提供的程序自动校准。其中的优点包括高精度、自动化、标准化以及程序可复制性,这些优点能够消除各种人为错误(可能发生在传统的手动校准中)。此外,初始校准既快捷又经济实惠。
用于未知工具和夹具初始校准的移动校准箱 (TCP & Base)
采用我们的移动校准箱,现在可以对未知工具和夹具进行灵活的移动校准。特别适合在设置新的生产线时使用。
标准箱包装清单:
- 精密激光传感器 120 mm x 120 mm
- 红外传感器 240 mm x 240 mm
- TCP 控制器
- 电缆组件
- 供电单元
- 用于固定移动传感器的三脚架
- 用于进行机器人控制的数据接口
- 软件包
- 调试文档
用户登录
请输入您的用户名和密码

