BizLink advintec TCP medición de herramientas
Aplicable para todas las marcas de robots.
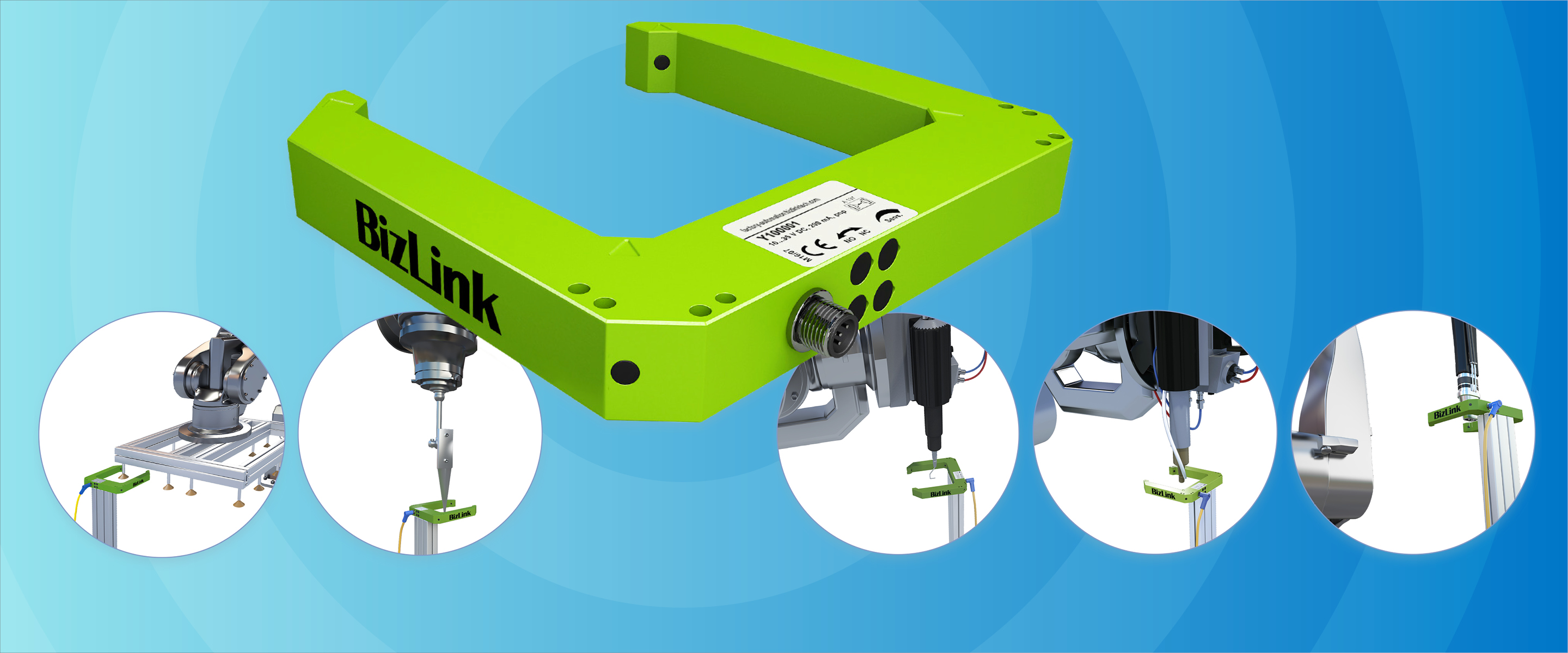
BizLink advintec TCP - Cálculo y calibración de herramientas y componentes robóticos en hasta 6 dimensiones
El reto
Asegurar continuamente la posición operativa correcta para accesorios y herramientas para robots como antorchas y fresadoras.
La solución
El sistema de calibración de herramientas BizLink advintec TCP calibra electrónicamente la herramienta o accesorio en hasta seis dimensiones. El programa del robot es corregido automáticamente por las variaciones medidas, y garantiza que la herramienta siempre funcione en la posición correcta. Advintec TCP es un sistema de calibración de alta precisión que se puede usar para todos los tipos de robos y la mayoría de herramientas robóticas con independencia de los diferentes fabricantes.
Su ventaja
La corrección tiene lugar de forma directa y automática en el proceso de producción en marcha.
Tamaños y dimensiones

Sensores infrarrojos BizLink advintec TCP - disponible en tres tamaños (dimensiones internas):
- 120 mm × 120 mm
- 240 mm × 240 mm
- 320 mm circular
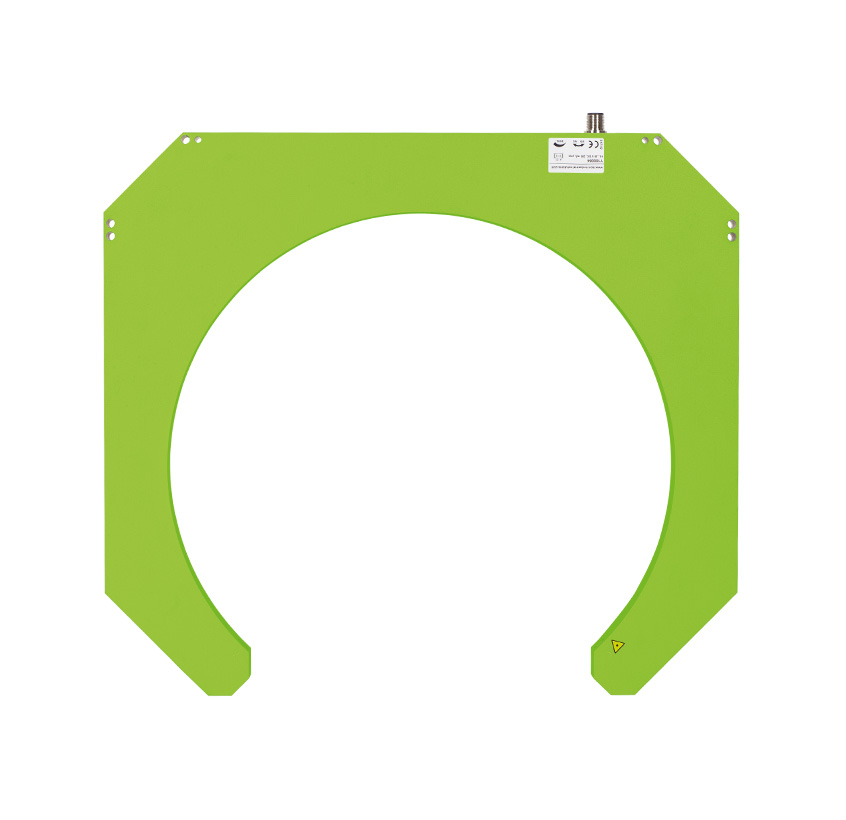
Sensores de láser de precisión BizLink advintec TCP - disponible en dos tamaños (dimensiones internas):
- 120 mm x 120 mm
- 320 mm circular
El sensor BizLink advintec TCP XS sólo está disponible en infrarrojos de 120 mm x 120 mm

Calibración de herramientas y componentes robóticos con BizLink advintec TCP - ventajas principales
- Cálculo absoluto automático de herramientas y accesorios robóticos
- Puesta en servicio automática y facilidad de uso
- Integración simplificada en la línea de producción gracias a su pequeña huella
- Sensor resistente disponible en dos tamaños
- Sistema multisensor (conexión posible a otros sensores)
- Reducción de costes
- Evita la producción de piezas defectuosas
- Evita la formación de chatarra y la recompostura
- Reduce los períodos de configuración
- Corrección automática de la trayectoria racias a la sustitución de herramientas o por desgaste y rotura
- 100 % garantía de calidad
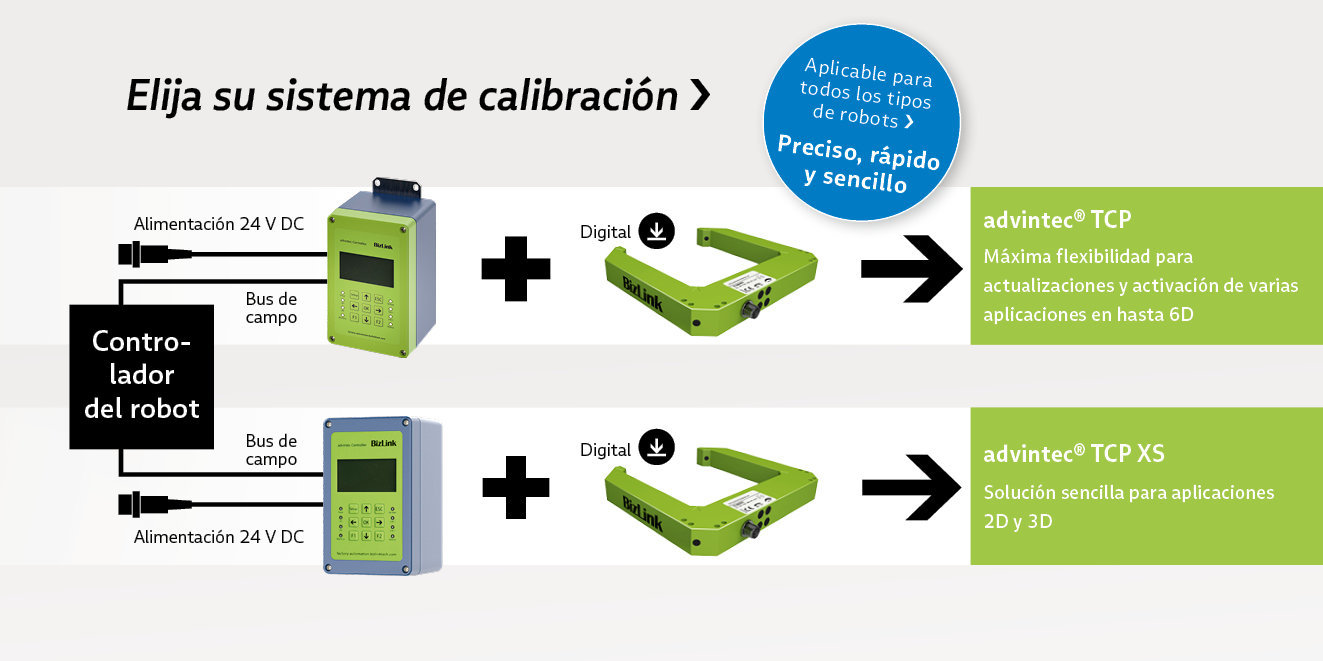
- Conexión del sistema de calibración al controlador del robot, es decir, el procedimiento de calibración tiene lugar en una unidad de evaluación y transfiere valores de corrección al controlador del robot
- Elevada fiabilidad de procesos
- Sin necesidad de PC adicionales
- Registro de datos de calibración
- Posibilidad de evaluación de datos en todo momento
Datos técnicos
| Tipo de sensor | 2 canales, infrarrojo, 880 nm, impulsos a 2 kHz |
| Interfaz | Bus de serie o de campo (DeviceNet, Profibus, Profinet, etc.) |
| Precisión de calibración | 0.02 mm |
| Tiempo de calibración típico* | Calibración 2D completa 3 s Calibración 3D completa 6 s Calibración 5D completa 9 s Calibración 6D completa 15 s |
| Clase de protección | IP67 |
| Suciedad en el entorno | Sí |
| Cubierta | Aluminio |
| Dimensiones | 2 o 3 traslaciones 5 (3 traslaciones + 2 rotaciones) 6 (3 traslaciones + 3 rotaciones) |
| Corrección automática de los datos de la herramienta | Sí |
| Campos de aplicación | Soldadura por arco, soldadura de espárragos, soldadura por puntos, soldadura por láser, soldadura de TIG, encolado, fresado, perforado, afilado, etc. |
| Marca CE | Sí |
| Tensión de funcionamiento | 10–34 V CC |
| Conexiones | Conector IBS, 5 patillas, conexión PE avanzada |
* Los tiempos de calibración pueden variar según las condiciones
Integración de BizLink advintec TCP-3D en el proceso de producción
- sencillo
- reducción al mínimo de la programación del robot
- instalación rápida
- configuración sencilla
- registro de los datos de calibración: posibilidad de evaluar regularmente los datos en cualquier momento
- no se requieren PC adicionales

Integración de BizLink advintec TCP-3D en una célula de soldadura robótica
Alcance del suministro
- 1) Sensor TCP
- 2) Controlador TCP
- Set de cables (5 m): cable de alimentación, cable de sensor, set de cables de bus
- Ejemplos de programas de robots
- Documentación para descargar
No incluido:
3) Limpiador de antorchas, 4) Robot
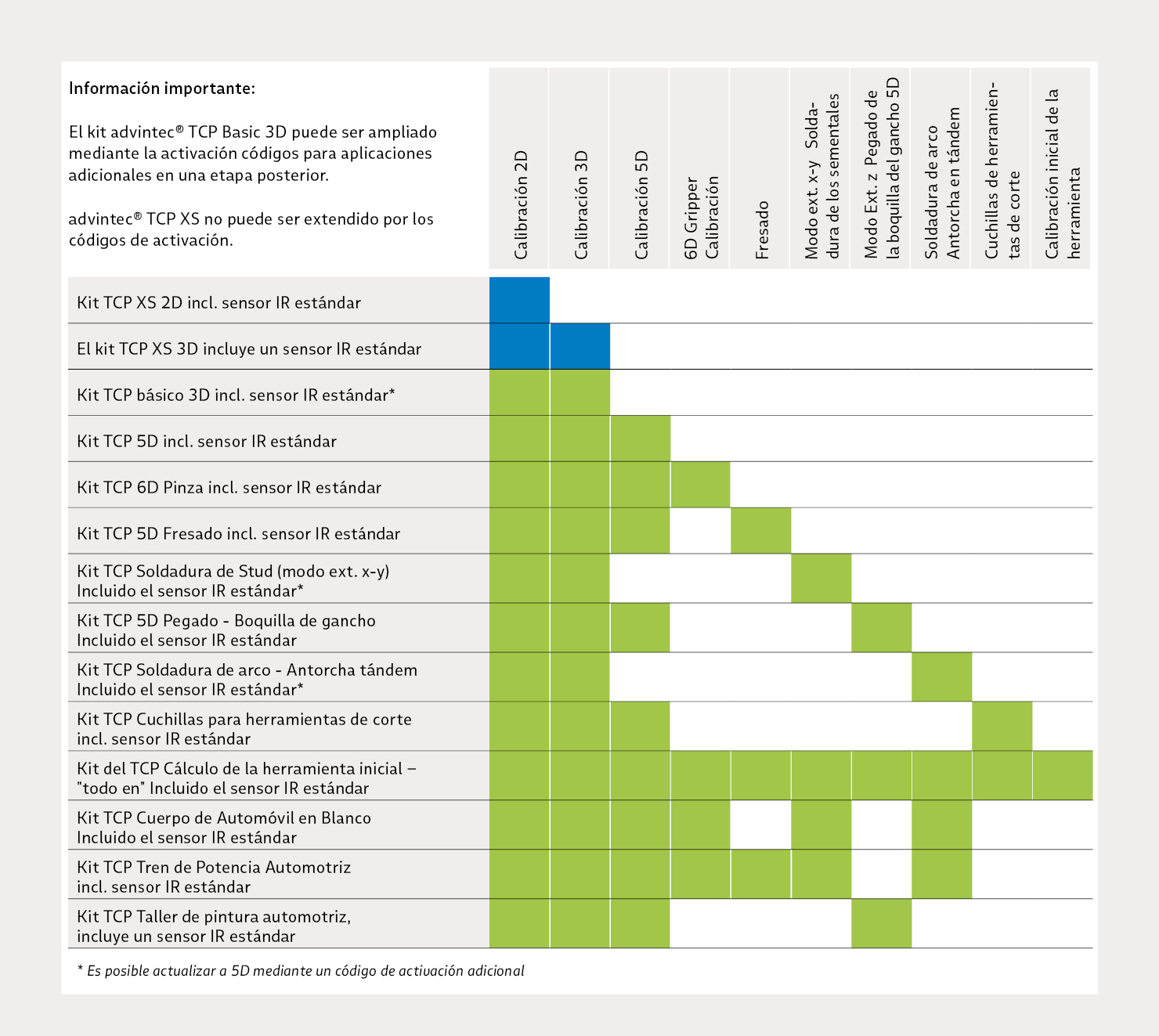
Aplicaciones
Aplicable para todas las herramientas simétricas de rotación
Para aplicaciones especiales, le ofrecemos paquetes tecnológicos opcionales
Fresado con software TCP
ste complemento de software se ha desarrollado especialmente para las aplicaciones de fresado y permite calibrar herramientas rotatorias con bordes cortantes como fresadoras o brocas. Además de la calibración de herramientas, contiene un sistema de detección de rotura de herramientas.
Soldadura de pernos en el software TCP
Este complemento de software se ha desarrollado especialmente para calibrar las herramientas de soldadura de pernos con pie. Facilita la calibración del perno o el portabrocas mientras que el software puede diferenciar entre el portabrocas y el pie.
Boquilla de sellador con el software TCP (boquilla de gancho
Este complemento de software se ha desarrollado especialmente para calibrar las boquillas selladoras con geometrías específicas (boquillas de gancho) para el sellado de bordes.
Antorcha doble en el software TC
Ambos hilos de soldadura se pueden calibrar simultáneamente.







Cuchillas/Herramientas de corte en el software TCP
Permite una calibración 6D de cuchillas de corte como cuchillos de desbarbado y ultrasónicos. Calibración exacta de la dirección de corte.



Maletín de calibración móvil
Para evitar lentas modificaciones de programas durante los trabajos de configuración de nuevas herramientas o de ampliación de la planta, ofrecemos una calibración inicial absoluta como parte de un proceso automatizado. Así se minimizan las programaciones posteriores. El proceso implica que la herramienta se desplace al centro de la barrera fotoeléctrica para generar los datos de la herramienta. En el sistema solo se deben programar la zona de tolerancia (donde la herramienta puede moverse) y el punto inicial de la calibración. Una vez completado, el robot mueve la herramienta dentro de la zona de tolerancia definida y se calibra automáticamente con la ayuda del programa suministrado. Algunas de las ventajas son el alto nivel de precisión y el procedimiento automatizado, estandarizado y reproducible que puede eliminar los tipos de errores humanos que ocurren con la calibración manual convencional. Además, la calibración inicial es también rápida y rentable.
Maletín de calibración móvil para la calibración inicial de herramientas y accesorios desconocidos (TCP y Base)
La calibración móvil flexible para herramientas y accesorios desconocidos ahora también es posible con nuestro maletín de calibración móvil. Ideal para configurar nuevas líneas de producción.
Contenido del maletín de calibración:
- Sensor de láser de precisión 120 mm x 120 mm
- Sensor de infrarrojos 240 mm x 240 mm
- Controlador TCP
- Set de cables
- Fuente de alimentación
- Trípode para montaje seguro de sensores móviles
- Interfaz de datos para el control robótico
- Paquete de software
- Documentación de puesta en marcha
Iniciar sesión de usuario
Introduce tu nombre de usuario y contraseña para iniciar tu sesión en el sitio web