Manutention
La manutention robotisée est un élément central de l’automatisation industrielle moderne. Des opérations pick-and-place à haute vitesse à la palettisation, à l’alimentation des machines et à l’intralogistique, les systèmes de manutention automatisés assurent un flux continu de matériaux dans les environnements de production et d’entreposage.
Des cadences élevées, des mouvements robotiques dynamiques et une complexité croissante des systèmes imposent des exigences importantes à l’ensemble de l’infrastructure robotique. Une transmission d’énergie fiable, une communication de données stable et un routage mécanique maîtrisé sont essentiels pour maintenir la disponibilité et l’efficacité de la production.
Grâce à des décennies d’expérience mondiale dans la connectivité industrielle et l’automatisation robotique, BizLink a fourni des centaines de milliers de solutions d’alimentation énergétique robotique et de gestion des câbles dans des usines automobiles, des lignes de production électronique, des installations d’emballage, des centres intralogistiques et des environnements en salle blanche à travers le monde. Plutôt que de considérer les câbles et les systèmes de gestion des câbles comme des composants individuels, BizLink aborde la gestion de l’énergie et des fluides robotiques comme une discipline d’ingénierie critique pour le système.
Les fabricants, OEM et équipementiers de rang 1 s’appuient sur la solide expertise applicative de BizLink dans la manutention à haute dynamique, sur sa présence mondiale en ingénierie et en service, ainsi que sur son vaste réseau de partenaires pour garantir une performance prévisible sur l’ensemble du cycle de vie, un risque réduit d’arrêts de production et une stabilité opérationnelle à long terme dans les applications de manutention exigeantes.
Qu’est-ce que la manutention robotisée ?
La manutention robotisée désigne le déplacement, le positionnement et la manipulation automatisés de pièces, de composants ou de produits dans des environnements de fabrication ou de logistique. Les robots industriels remplacent ou assistent les tâches manuelles, améliorant ainsi la vitesse, la régularité et la sécurité.
Tâches typiques de manutention
Les applications robotiques de manutention les plus courantes comprennent :
- les opérations de pick-and-place
- la palettisation et la dépalettisation
- l’alimentation des machines
- le tri et l’emballage
- l’alimentation en bord de ligne et le transfert de pièces
Ces applications fonctionnent généralement en continu sur plusieurs équipes, ce qui engendre des contraintes mécaniques et électriques durables sur les systèmes robotiques.
Pourquoi l’automatisation augmente dans la manutention robotisée
Les fabricants automatisent de plus en plus la manutention robotisée afin de :
- faire face à la pénurie de main-d’œuvre
- augmenter le débit
- améliorer la régularité des processus
- permettre des stratégies de production flexibles
- réduire les erreurs opérationnelles
L’automatisation soutient des environnements de production évolutifs et pilotés par les données.

Quels robots sont utilisés dans la manutention robotisée ?
Robots articulés
Les robots articulés sont largement utilisés pour des mouvements complexes sur plusieurs axes, tels que les opérations de pick-and-place, l’alimentation des machines et le transfert sur les lignes d’assemblage. Leur flexibilité permet un positionnement précis sur de larges enveloppes de travail.
Robots mobiles autonomes (AMR) et véhicules à guidage automatique (AGV)
Les AMR et les AGV permettent un transport horizontal flexible des matériaux dans les environnements de production et d’entreposage.
- Les AMR utilisent une navigation basée sur des capteurs et une planification dynamique des trajets.
- Les AGV suivent des itinéraires prédéfinis pour des tâches de transport prévisibles.
Les deux jouent un rôle clé dans l’intralogistique moderne et dans les concepts décentralisés de flux de matériaux.
Robots collaboratifs (cobots)
Les cobots sont conçus pour une interaction sûre entre l’homme et le robot. Dans la manutention robotisée, ils soutiennent l’approvisionnement flexible des postes de travail, la production en petites séries et les processus d’assemblage assistés. Leur intégration nécessite une communication de données stable et une conception système maîtrisée.
Robots Scara et Delta à grande vitesse
Les robots Scara et Delta sont couramment utilisés dans les applications d’emballage et de tri, où des cadences extrêmement élevées et une manutention légère sont requises. Leurs mouvements dynamiques génèrent des contraintes de torsion importantes sur les câbles et les systèmes de gestion des câbles robotiques.
Dans quels secteurs les solutions de manutention robotisée sont-elles utilisées ?
Nos solutions prennent en charge la manutention robotisée dans les secteurs où la précision, le débit et la disponibilité des installations sont essentiels. Les cas d’usage courants comprennent :
- fabrication automobile : alimentation en bord de ligne, transport de pièces
- production électronique : opérations de pick-and-place de précision
- emballage agroalimentaire : manutention hygiénique à grande vitesse
- environnements pharmaceutiques et salles blanches : manutention contrôlée
- intralogistique et centres de traitement des commandes e-commerce : tri et préparation de commandes
- construction mécanique et ingénierie des installations : alimentation automatisée et alimentation des machines
Cela montre comment les robots transforment de plus en plus les flux de matériaux dans de nombreux secteurs.
Architecture système dans la manutention robotisée
Le déploiement réussi de la manutention robotisée exige plus que le simple choix du bon type de robot. La performance dépend d’une architecture système coordonnée et stable.
Une configuration d’automatisation fiable comprend généralement :
- des effecteurs terminaux tels que des préhenseurs ou des outils à vide
- des systèmes de vision et de capteurs pour la reconnaissance des objets
- des systèmes MES (Manufacturing Execution Systems) ou WMS (Warehouse Management Systems)
- et surtout : une alimentation robuste en énergie, en données et en fluides tout au long de la cinématique du robot
Alors que le robot exécute le mouvement, l’infrastructure qui le soutient détermine la fiabilité à long terme. Des performances stables des câbles, un routage maîtrisé et une alimentation en fluides durable sont essentiels pour garantir une stabilité durable de la production.
Pourquoi la fiabilité de la manutention détermine la performance de production
Les systèmes de manutention fonctionnent à l’intersection de la vitesse, de la précision et de l’endurance. Leur fiabilité influence directement la productivité et l’efficacité globale des équipements (TRS).
Mouvements hautement dynamiques et contraintes de cadence
Les robots de manutention fonctionnent fréquemment avec :
- des accélérations et décélérations élevées
- des changements rapides de direction
- un fonctionnement continu sur plusieurs équipes
Ces charges dynamiques introduisent des contraintes permanentes de torsion et de flexion dans les câbles et les systèmes de gestion des câbles robotiques.
Variabilité des charges utiles et influence des effecteurs terminaux
Différents préhenseurs, systèmes à vide et poids de charge influencent le comportement en couple et les rayons de courbure des câbles. Une instabilité mécanique peut réduire la précision du positionnement et raccourcir la durée de vie des composants.
Intégration croissante des données et des capteurs
Les systèmes de manutention modernes s’appuient sur la robotique guidée par vision, le suivi par codes-barres et les systèmes de préparation assistés par l’IA. Une transmission du signal stable et sans interférences est essentielle pour garantir un fonctionnement fiable.
Facteurs de qualité critiques dans la manutention robotisée
Stabilité de la transmission de l’énergie et des données
Une alimentation stable en énergie et en signaux est essentielle pour la commande des mouvements, le fonctionnement des capteurs et la performance des préhenseurs. La fatigue des câbles ou les interruptions de signal peuvent perturber immédiatement le flux de production.
Routage contrôlé des câbles et stabilité mécanique
Un mouvement non maîtrisé du système de gestion des câbles peut :
- introduire une torsion excessive
- influencer le positionnement du robot
- accélérer l’usure aux points de flexion
Un routage structuré améliore la prévisibilité et la durabilité à long terme.
Maintenance prédictive et transparence de l’usure
Dans les environnements à cadence élevée, la détection précoce des schémas d’usure est essentielle. La surveillance du comportement mécanique permet une planification proactive de la maintenance et réduit les arrêts imprévus.
Solutions BizLink pour la manutention robotisée
Une manutention robotisée fiable nécessite une infrastructure robuste, un routage mécanique maîtrisé et une surveillance intelligente. BizLink répond à ces exigences avec des solutions intégrées conçues pour des environnements industriels dynamiques.
Systèmes de gestion des câbles robotiques
Systèmes modulaires et spécifiques au robot, conçus pour un routage contrôlé et des rayons de courbure définis.
Avantages
- réduction des contraintes mécaniques
- gestion maîtrisée de la torsion
- durée de vie accrue des câbles
- conception facilitant la maintenance
- personnalisation pour les OEM et les intégrateurs
Applications typiques
- opérations de pick-and-place
- alimentation des machines
- palettisation et dépalettisation
- automatisation logistique
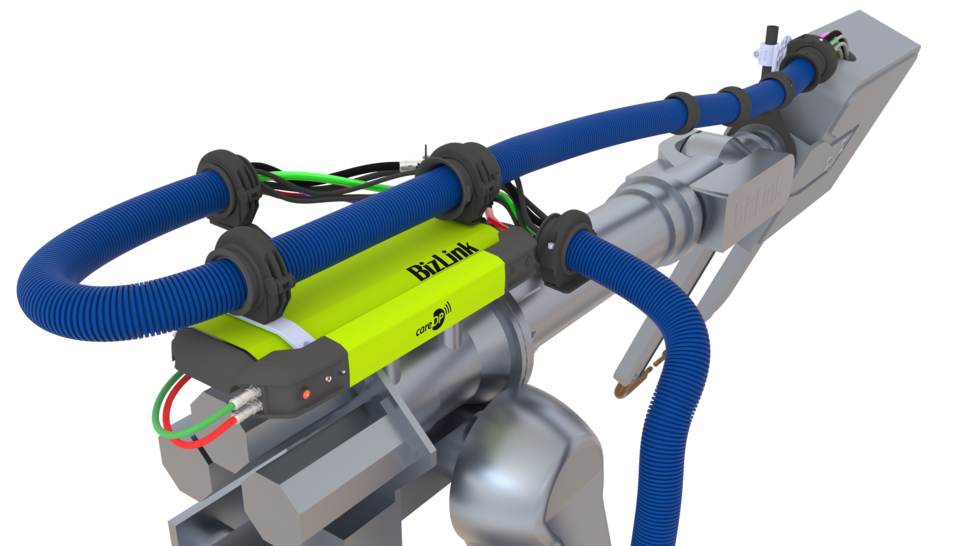
Systèmes de gestion des câbles BizLink
careDP – Surveillance de l’état des systèmes de gestion des câbles robotiques
careDP permet une surveillance basée sur l’état des systèmes de gestion des câbles robotiques.
Il permet la détection précoce de :
- l’évolution de l’usure
- conditions de contrainte critiques
- défaillances imminentes des câbles
Avantages
- planification prédictive de la maintenance
- réduction des arrêts imprévus
- transparence accrue du système
- meilleure efficacité globale des équipements (TRS)
Câbles d’énergie et de données hautement flexibles
Câbles robotiques haute performance conçus pour les mouvements dynamiques continus, la torsion multi-axes et une longue durée de vie dans des environnements de manutention exigeants.
Ils sont conçus pour garantir une transmission d’énergie stable et une intégrité fiable du signal, même à des cadences élevées et avec des charges utiles variables.
Avantages
- grande résistance à la torsion pour les mouvements robotiques multi-axes
- transmission stable de l’énergie sous charge dynamique
- communication de données fiable pour les systèmes de vision et de capteurs
- longue durée de vie en fonctionnement continu
- réduction des arrêts imprévus grâce à une moindre fatigue des câbles
- blindage optimisé pour une transmission du signal sans interférences
Applications typiques
- opérations de pick-and-place à haute vitesse
- systèmes de manutention guidés par vision
- lignes d’emballage automatisées
- alimentation de cellules d’assemblage
- postes intralogistiques flexibles
En savoir plus sur les câbles robotiques
Flexibles et tuyaux pour fluides durables pour applications robotiques
Des solutions robustes de flexibles pneumatiques et à vide, conçues pour les mouvements robotiques dynamiques et les cycles continus de manutention.
Elles sont conçues pour assurer une alimentation stable en fluides tout en résistant à l’abrasion, à la torsion et aux flexions répétées.
Avantages
- performance fiable en pneumatique et en vide
- résistance à l’abrasion et aux contraintes mécaniques
- débit d’air stable lors de mouvements dynamiques
- longs intervalles de maintenance
- risque réduit de fuite
- flexibilité optimisée pour un routage compact dans les systèmes de gestion des câbles robotiques
Applications typiques
- systèmes de préhension à vide
- préhenseurs pneumatiques
- automatisation de l’emballage
- palettisation et dépalettisation
- postes de manutention collaboratifs
FAQ Manutention
Quels sont les problèmes de défaillance les plus fréquents dans les applications de manutention ?
Les points de défaillance les plus fréquents dans les applications robotiques de manutention sont les ruptures de câbles, la fatigue en torsion, l’abrasion des flexibles, les défaillances des connecteurs et une décharge de traction insuffisante au niveau des axes du robot soumis à de fortes charges dynamiques. Ces problèmes sont souvent causés par un routage non maîtrisé des câbles, des rayons de courbure trop faibles et l’augmentation des profils d’accélération du robot.
Comment l’accélération et la décélération du robot affectent-elles la durée de vie des câbles robotiques ?
Des taux d’accélération et de décélération plus élevés augmentent considérablement les contraintes mécaniques exercées sur les câbles et les flexibles. Les changements rapides de mouvement génèrent des charges cycliques de torsion et de flexion qui accélèrent la fatigue des matériaux. Sans un système de gestion des câbles correctement conçu pour maîtriser le routage et la répartition des contraintes, la durée de vie des câbles peut diminuer fortement à mesure que la vitesse du robot augmente.
Pourquoi les systèmes de gestion des câbles tombent-ils en panne lorsque la vitesse du robot augmente ?
À mesure que la vitesse du robot et les cadences augmentent, les forces dynamiques exercées sur le système de gestion des câbles augmentent de manière exponentielle. Des systèmes mal conçus peuvent permettre des mouvements non maîtrisés, des fouettements de câbles, une torsion excessive ou des points de contrainte localisés. Avec le temps, cela entraîne des dommages à l’isolation, une fatigue des conducteurs et une défaillance prématurée du système. Les applications à haute vitesse exigent une géométrie de routage conçue avec précision, des rayons de courbure définis et une stabilisation mécanique.
Comment prévenir les défaillances de câbles dans les applications robotiques de manutention ?
Les défaillances de câbles peuvent être fortement réduites grâce à l’utilisation de câbles hautement flexibles spécifiques aux robots, de systèmes de routage maîtrisés, d’une décharge de traction appropriée et de solutions de surveillance d’état telles que careDP. Une ingénierie spécifique à l’application est essentielle dans les environnements à cadence élevée.
Optimisons les performances de votre manutention robotisée
Que vous soyez responsable de l’intégration robotique, de la fiabilité des installations, de l’ingénierie de l’automatisation ou de la performance opérationnelle, nous vous aidons à concevoir des systèmes de manutention robotisée haute performance qui protègent la disponibilité des installations. Échangeons sur la manière de réduire les risques et de garantir la stabilité du système à long terme.