Manipulación de materiales
La manipulación robótica es un elemento central de la automatización industrial moderna. Desde operaciones pick-and-place de alta velocidad hasta paletización, alimentación de máquinas e intralogística, los sistemas automatizados de manipulación garantizan un flujo continuo de materiales en entornos de producción y almacén.
Las altas cadencias, el movimiento dinámico de los robots y la creciente complejidad de los sistemas imponen exigencias significativas a toda la infraestructura robótica. Una transmisión fiable de energía, una comunicación estable de datos y un guiado mecánico controlado son esenciales para mantener el tiempo de actividad y la eficiencia de la producción.
Con décadas de experiencia global en conectividad industrial y automatización robótica, BizLink ha suministrado cientos de miles de soluciones de suministro energético robótico y gestión de cables en plantas de automoción, líneas de producción electrónica, instalaciones de envasado, centros intralogísticos y entornos de sala blanca en todo el mundo. En lugar de tratar los cables y los sistemas de gestión de cables como componentes individuales, BizLink aborda la gestión robótica de energía y medios como una disciplina de ingeniería crítica para el sistema.
Fabricantes, OEM y proveedores Tier confían en la amplia experiencia aplicada de BizLink en manipulación de alta dinámica, en su presencia global de ingeniería y servicio y en su extensa red de socios para garantizar un rendimiento predecible a lo largo del ciclo de vida, reducir el riesgo de paradas y asegurar una estabilidad operativa a largo plazo en aplicaciones exigentes de manipulación.
¿Qué es la manipulación robótica de materiales?
La manipulación robótica de materiales se refiere al movimiento, posicionamiento y manejo automatizados de piezas, componentes o productos dentro de entornos de fabricación o logística. Los robots industriales sustituyen o respaldan tareas manuales, mejorando así la velocidad, la consistencia y la seguridad.
Tareas típicas de manipulación de materiales
Las aplicaciones robóticas de manipulación más habituales incluyen:
- operaciones de pick-and-place
- paletizado y despaletizado
- alimentación de máquinas
- clasificación y embalaje
- alimentación a pie de línea y transferencia de piezas
Estas aplicaciones suelen funcionar de forma continua a lo largo de varios turnos, lo que genera una carga mecánica y eléctrica sostenida sobre los sistemas robóticos.
Por qué está aumentando la automatización en la manipulación robótica de materiales
Los fabricantes automatizan cada vez más la manipulación robótica de materiales para:
- hacer frente a la escasez de mano de obra
- aumentar el rendimiento
- mejorar la consistencia de los procesos
- posibilitar estrategias de producción flexibles
- reducir los errores operativos
La automatización respalda entornos de fabricación escalables y basados en datos.

¿Qué robots se utilizan en la manipulación robótica de materiales?
Robots articulados
Los robots articulados se utilizan ampliamente para movimientos complejos de múltiples ejes, como operaciones de pick-and-place, alimentación de máquinas y transferencia en líneas de producción. Su flexibilidad permite un posicionamiento preciso en amplias áreas de trabajo.
Robots móviles autónomos (AMR) y vehículos de guiado automático (AGV)
Los AMR y los AGV permiten un transporte horizontal flexible de materiales en entornos de producción y almacenamiento.
- Los AMR utilizan navegación basada en sensores y planificación dinámica de rutas.
- Los AGV siguen rutas predefinidas para tareas de transporte previsibles.
Ambos desempeñan un papel clave en la intralogística moderna y en los conceptos descentralizados de flujo de materiales.
Robots colaborativos (cobots)
Los cobots están diseñados para una interacción segura entre personas y robots. En la manipulación robótica de materiales, apoyan el suministro flexible de puestos de trabajo, la producción de lotes pequeños y los procesos de ensamblaje asistido. Su integración requiere una comunicación de datos estable y un diseño controlado del sistema.
Robots Scara y Delta de alta velocidad
Los robots Scara y Delta se utilizan habitualmente en aplicaciones de envasado y clasificación, donde se requieren cadencias extremadamente altas y una manipulación ligera. Su movimiento dinámico genera importantes esfuerzos de torsión en los cables y los sistemas de gestión de cables robóticos.
¿En qué industrias se utilizan las soluciones robóticas de manipulación de materiales?
Nuestras soluciones respaldan la manipulación robótica de materiales en sectores donde la precisión, el rendimiento y el tiempo de actividad son fundamentales. Los casos de uso habituales incluyen:
- fabricación de automóviles: alimentación a pie de línea, transporte de piezas
- producción electrónica: operaciones precisas de pick-and-place
- envasado de alimentos y bebidas: manipulación higiénica y de alta velocidad
- entornos farmacéuticos y salas blancas: manipulación controlada
- intralogística y centros de preparación de pedidos para comercio electrónico: clasificación y preparación de pedidos
- ingeniería mecánica y de plantas: suministro automatizado y alimentación de máquinas
Esto refleja cómo los robots transforman cada vez más el flujo de materiales en distintos sectores.
Arquitectura del sistema en la manipulación robótica de materiales
La implementación satisfactoria de la manipulación robótica de materiales requiere algo más que seleccionar el tipo de robot adecuado. El rendimiento depende de una arquitectura del sistema coordinada y estable.
Una configuración de automatización fiable suele incluir:
- efectores finales como pinzas o herramientas de vacío
- sistemas de visión y sensores para el reconocimiento de objetos
- sistemas MES (Manufacturing Execution Systems) o WMS (Warehouse Management Systems)
- y, de forma crítica: un suministro robusto de energía, datos y medios a lo largo de la cinemática del robot
Aunque el robot realiza el movimiento, la infraestructura de soporte determina la fiabilidad a largo plazo. Un rendimiento estable de los cables, un guiado controlado y un suministro duradero de medios son fundamentales para mantener una producción estable a largo plazo.
Por qué la fiabilidad en la manipulación de materiales determina el rendimiento de la producción
Los sistemas de manipulación de materiales operan en la intersección entre velocidad, precisión y resistencia. Su fiabilidad influye directamente en la productividad y en la eficacia global del equipo (OEE).
Movimiento altamente dinámico y carga por ciclos
Los robots de manipulación suelen operar con:
- alta aceleración y desaceleración
- cambios rápidos de dirección
- funcionamiento continuo a lo largo de varios turnos
Estas cargas dinámicas introducen esfuerzos constantes de torsión y flexión en los cables y en los sistemas de gestión de cables robóticos.
Variabilidad de la carga útil e influencia de los efectores finales
Los distintos tipos de pinzas, sistemas de vacío y pesos de carga influyen en el comportamiento del par y en los radios de curvatura de los cables. La inestabilidad mecánica puede reducir la precisión de posicionamiento y acortar la vida útil de los componentes.
Creciente integración de datos y sensores
Los sistemas modernos de manipulación se basan en robótica guiada por visión, seguimiento por códigos de barras y sistemas de picking asistidos por IA. Una transmisión de señal estable y libre de interferencias es esencial para un funcionamiento fiable.
Factores críticos de calidad en la manipulación robótica de materiales
Estabilidad de la transmisión de energía y datos
Un suministro estable de energía y señales es esencial para el control del movimiento, la funcionalidad de los sensores y el rendimiento de las pinzas. La fatiga de los cables o las interrupciones de señal pueden alterar inmediatamente el flujo de producción.
Guiado controlado de cables y estabilidad mecánica
Un movimiento no controlado del sistema de gestión de cables puede:
- generar una torsión excesiva
- influir en el posicionamiento del robot
- acelerar el desgaste en los puntos de flexión
Un guiado estructurado mejora la previsibilidad y la durabilidad a largo plazo.
Mantenimiento predictivo y transparencia del desgaste
En entornos de alta cadencia, la detección temprana de patrones de desgaste es fundamental. La supervisión del comportamiento mecánico permite una planificación proactiva del mantenimiento y reduce las paradas no planificadas.
Soluciones de BizLink para la manipulación robótica de materiales
Una manipulación robótica fiable requiere una infraestructura robusta, un guiado mecánico controlado y una monitorización inteligente. BizLink respalda estos requisitos con soluciones integradas diseñadas para entornos industriales dinámicos.
Sistemas de gestión de cables robóticos
Sistemas modulares y específicos para cada robot, diseñados para un guiado controlado y radios de curvatura definidos.
Ventajas
- reducción del esfuerzo mecánico
- gestión controlada de la torsión
- mayor vida útil de los cables
- diseño de fácil mantenimiento
- personalización para OEM e integradores
Aplicaciones típicas
- operaciones de pick-and-place
- alimentación de máquinas
- paletizado y despaletizado
- automatización logística
Sistemas de gestión de cables de BizLink
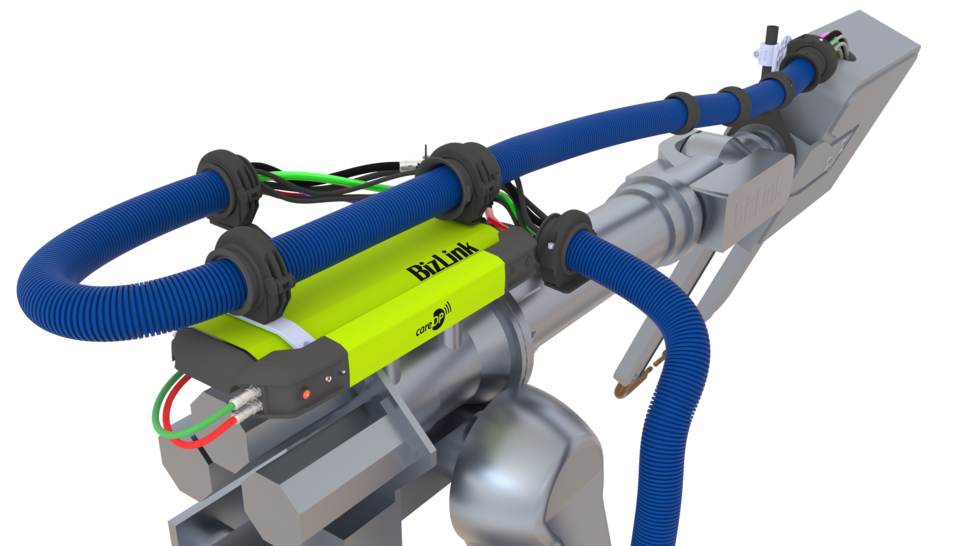
careDP – Monitorización del estado de los sistemas de gestión de cables robóticos
careDP permite la monitorización basada en el estado de los sistemas de gestión de cables robóticos.
Permite la detección temprana de:
- progresión del desgaste
- condiciones críticas de esfuerzo
- fallos inminentes de cables
Ventajas
- planificación predictiva del mantenimiento
- reducción de paradas no planificadas
- mayor transparencia del sistema
- mayor eficacia global del equipo (OEE)
Cables de energía y datos de alta flexibilidad
Cables robóticos de alto rendimiento desarrollados para movimiento dinámico continuo, torsión multieje y larga vida útil en entornos exigentes de manipulación.
Están diseñados para garantizar una transmisión estable de energía y una integridad fiable de la señal incluso con altas cadencias y condiciones de carga útil variables.
Ventajas
- alta resistencia a la torsión para movimientos robóticos multieje
- transmisión estable de energía bajo carga dinámica
- comunicación de datos fiable para sistemas de visión y sensores
- larga vida útil en funcionamiento continuo
- reducción de paradas no planificadas debido a una menor fatiga del cable
- apantallamiento optimizado para una transmisión de señal libre de interferencias
Aplicaciones típicas
- operaciones pick-and-place de alta velocidad
- sistemas de manipulación guiados por visión
- líneas de envasado automatizadas
- suministro a celdas de ensamblaje
- estaciones intralogísticas flexibles
Más información sobre cables robóticos
Mangueras para medios duraderas para aplicaciones robóticas
Soluciones robustas de mangueras neumáticas y de vacío, diseñadas para movimientos robóticos dinámicos y ciclos continuos de manipulación.
Están diseñadas para mantener un suministro estable de medios y, al mismo tiempo, resistir la abrasión, la torsión y la flexión repetitiva.
Ventajas
- rendimiento fiable de neumática y vacío
- resistencia a la abrasión y al esfuerzo mecánico
- flujo de aire estable durante el movimiento dinámico
- largos intervalos de mantenimiento
- menor riesgo de fugas
- flexibilidad optimizada para un guiado compacto en los sistemas de gestión de cables robóticos
Aplicaciones típicas
- sistemas de agarre basados en vacío
- pinzas neumáticas
- automatización del envasado
- paletizado y despaletizado
- estaciones colaborativas de manipulación
Preguntas frecuentes sobre manipulación de materiales
¿Cuáles son los problemas de fallo más comunes en las aplicaciones de manipulación?
Los puntos de fallo más frecuentes en las aplicaciones robóticas de manipulación son las roturas de cables, la fatiga por torsión, la abrasión de mangueras, los fallos de conectores y una descarga de tracción insuficiente en los ejes del robot sometidos a altas cargas dinámicas. Estos problemas suelen estar provocados por un guiado de cables no controlado, radios de curvatura excesivamente pequeños y perfiles de aceleración del robot cada vez más exigentes.
¿Cómo afectan la aceleración y la desaceleración del robot a la vida útil de los cables robóticos?
Las mayores tasas de aceleración y desaceleración aumentan significativamente el esfuerzo mecánico sobre cables y mangueras. Los cambios rápidos de movimiento generan cargas cíclicas de torsión y flexión que aceleran la fatiga del material. Sin un sistema de gestión de cables correctamente diseñado que controle el guiado y la distribución de esfuerzos, la vida útil del cable puede reducirse drásticamente a medida que aumenta la velocidad del robot.
¿Por qué fallan los sistemas de gestión de cables cuando aumenta la velocidad del robot?
A medida que aumentan la velocidad del robot y las cadencias, las fuerzas dinámicas sobre el sistema de gestión de cables crecen de forma exponencial. Los sistemas mal diseñados pueden permitir movimientos no controlados, latigueo del cable, torsión excesiva o puntos de esfuerzo localizados. Con el tiempo, esto provoca daños en el aislamiento, fatiga del conductor y fallos prematuros del sistema. Las aplicaciones de alta velocidad requieren una geometría de guiado diseñada específicamente, radios de curvatura definidos y estabilización mecánica.
¿Cómo pueden prevenirse los fallos de cables en las aplicaciones robóticas de manipulación?
Los fallos de cables pueden reducirse de forma significativa mediante el uso de cables de alta flexibilidad específicos para robots, sistemas de guiado controlado, una descarga de tracción adecuada y soluciones de monitorización del estado como careDP. La ingeniería específica para cada aplicación es fundamental en entornos de alta cadencia.
Optimicemos el rendimiento de su manipulación robótica de materiales
Tanto si es responsable de la integración robótica, la fiabilidad de la planta, la ingeniería de automatización o el rendimiento operativo, le ayudamos a diseñar sistemas robotizados de manipulación de materiales de alto rendimiento que protejan el tiempo de actividad. Hablemos de cómo reducir riesgos y garantizar la estabilidad del sistema a largo plazo.