マテリアルハンドリング
ロボットハンドリングは、現代の産業オートメーションにおける中核要素です。高速ピックアンドプレースから、パレタイジング、マシンテンディング、イントラロジスティクスに至るまで、自動化ハンドリングシステムは、生産および倉庫環境全体で連続的なマテリアルフローを実現します。
高いサイクルレート、ダイナミックなロボット動作、そして増大するシステムの複雑性は、ロボットインフラ全体に大きな要求を課します。信頼性の高いエネルギー伝送、安定したデータ通信、そして制御された機械的配索は、稼働率と生産効率を維持するために不可欠です。
産業用コネクティビティとロボットオートメーションにおける数十年にわたるグローバルな経験を活かし、BizLink は世界中の自動車工場、電子機器生産ライン、包装設備、イントラロジスティクス拠点、クリーンルーム環境において、数十万件に及ぶロボット用エネルギー供給およびケーブルマネジメントソリューションを提供してきました。BizLink は、ケーブルやロボット用ケーブルマネジメントシステムを個別部品として扱うのではなく、ロボットのエネルギーおよびメディア管理をシステムクリティカルなエンジニアリング分野として捉えています。
メーカー、OEM、ティアサプライヤーは、高ダイナミックなハンドリング分野における BizLink の深いアプリケーション知見、グローバルなエンジニアリングおよびサービス体制、そして広範なパートナーネットワークを活用し、要求の厳しいハンドリング用途において、予測可能なライフサイクル性能、ダウンタイムリスクの低減、長期的な運用安定性を確保しています。
ロボットハンドリングとは何ですか。
ロボットハンドリングとは、製造または物流環境において、部品、コンポーネント、製品を自動的に搬送し、位置決めし、取り扱うことを指します。産業用ロボットは手作業を代替または補完し、速度、一貫性、安全性を向上させます。
代表的なハンドリング作業
一般的なロボットハンドリング用途には、以下が含まれます。
- ピックアンドプレース作業
- パレタイジングおよびデパレタイジング
- マシンテンディング
- 仕分けおよび包装
- ラインサイド供給および部品搬送
これらの用途は通常、複数シフトにわたって連続稼働するため、ロボットシステムに継続的な機械的および電気的負荷を与えます。
なぜロボットハンドリングにおける自動化が進んでいるのか
メーカーがロボットハンドリングの自動化をますます進めている理由は、次のとおりです。
- 人手不足への対応
- スループットの向上
- プロセスの一貫性向上
- 柔軟な生産戦略の実現
- オペレーションエラーの削減
自動化は、拡張性が高くデータ主導型の製造環境を支えます。

ロボットハンドリングにはどのようなロボットが使用されますか。
多関節ロボット
多関節ロボットは、ピックアンドプレース、マシンテンディング、製造ラインでの搬送など、複雑な多軸動作に幅広く使用されています。その柔軟性により、広い動作範囲にわたって高精度な位置決めが可能です。
自律走行搬送ロボット(AMR)および無人搬送車(AGV)
AMR と AGV は、生産および倉庫環境において、柔軟な水平方向のマテリアル搬送を可能にします。
- AMR は、センサーベースのナビゲーションと動的な経路計画を使用します。
- AGV は、予測可能な搬送タスクのために、あらかじめ定義されたルートに従って走行します。
両者は、現代のイントラロジスティクスと分散型マテリアルフローの概念において重要な役割を果たします。
協働ロボット(コボット)
コボットは、安全な人とロボットの協働のために設計されています。ロボットハンドリングにおいては、柔軟な作業ステーションへの供給、小ロット生産、支援付き組立工程を支えます。その統合には、安定したデータ通信と適切に管理されたシステム設計が必要です。
高速 Scara ロボットおよび Delta ロボット
Scara ロボットおよび Delta ロボットは、極めて高いサイクルレートと軽量ハンドリングが求められる包装および仕分け用途で一般的に使用されています。これらの動的な動作は、ケーブルやロボット用ケーブルマネジメントシステムに大きなねじり負荷を生じさせます。
ロボットハンドリングソリューションはどのような業界で使用されていますか。
当社のソリューションは、精度、スループット、稼働率が重要となる業界におけるロボットハンドリングを支えています。代表的な用途は次のとおりです。
- 自動車製造:ラインサイド供給、部品搬送
- 電子機器製造:高精度ピックアンドプレース
- 食品・飲料包装:衛生的で高速なハンドリング
- 医薬品およびクリーンルーム環境:制御されたハンドリング
- イントラロジスティクスおよび E コマース向けフルフィルメントセンター:仕分けおよびオーダーピッキング
- 機械・プラントエンジニアリング:自動供給およびマシンテンディング
これは、ロボットがさまざまな業界におけるマテリアルフローをますます変革していることを示しています。
ロボットハンドリングにおけるシステムアーキテクチャ
ロボットハンドリングを成功裏に導入するには、適切なロボットタイプを選定するだけでは不十分です。パフォーマンスは、整合性が取れた安定したシステムアーキテクチャに依存します。
信頼性の高い自動化構成には、通常以下が含まれます。
- グリッパーや真空ツールなどのエンドエフェクタ
- 物体認識のためのビジョンシステムおよびセンサーシステム
- MES(Manufacturing Execution Systems)または WMS(Warehouse Management Systems)
- そして特に重要なのが、ロボットの運動機構に沿った堅牢なエネルギー、データ、媒体の供給です
ロボット自体が動作を実行する一方で、長期的な信頼性を左右するのは、それを支えるインフラです。安定したケーブル性能、制御された配索、そして耐久性のある媒体供給は、持続的な生産安定性のための基本要件です。
なぜハンドリングの信頼性が生産性能を左右するのか
ハンドリングシステムは、速度、精度、耐久性が交わる領域で稼働します。その信頼性は、生産性と設備総合効率(OEE)に直接影響します。
高ダイナミック動作とサイクル負荷
ハンドリングロボットは、しばしば次のような条件で動作します。
- 高い加速および減速
- 迅速な方向転換
- 複数シフトにわたる連続稼働
これらの動的負荷は、ケーブルやロボット用ケーブルマネジメントシステムに継続的なねじり応力と屈曲応力を与えます。
可搬重量の変動とエンドエフェクタの影響
異なるグリッパー、真空システム、可搬重量は、トルク特性やケーブルの曲げ半径に影響を与えます。機械的な不安定性は、位置決め精度を低下させ、部品寿命を短くする可能性があります。
データとセンサー統合の高度化
現代のハンドリングシステムは、ビジョンガイドロボティクス、バーコード追跡、AI 支援ピッキングシステムに依存しています。安定した干渉のない信号伝送は、信頼性の高い運用に不可欠です。
ロボットハンドリングにおける重要な品質要因
エネルギーおよびデータ伝送の安定性
安定した電力および信号の供給は、動作制御、センサー機能、グリッパー性能に不可欠です。ケーブルの疲労や信号の途絶は、生産フローを直ちに乱す可能性があります。
制御されたケーブル配索と機械的安定性
ロボット用ケーブルマネジメントシステムの制御されていない動きは、次のような影響をもたらす可能性があります。
- 過度なねじり負荷を生じさせる
- ロボットの位置決めに影響を与える
- 屈曲箇所での摩耗を加速させる
構造化された配索は、予測可能性と長期的な耐久性を向上させます。
予知保全と摩耗の可視化
高サイクル環境では、摩耗パターンを早期に検知することが極めて重要です。機械的挙動を監視することで、予防的な保全計画が可能になり、予期しないダウンタイムを削減できます。
BizLink のロボットハンドリング向けソリューション
信頼性の高いロボットハンドリングには、堅牢なインフラ、制御された機械的配索、そしてインテリジェントな監視が必要です。BizLink は、動的な産業環境向けに設計された統合ソリューションで、これらの要件を支援します。
ロボット用ケーブルマネジメントシステム
制御された配索と規定された曲げ半径のために設計された、モジュール式かつロボット別対応のケーブルマネジメントシステムです。
メリット
- 機械的負荷の低減
- 制御されたねじり管理
- ケーブル寿命の向上
- メンテナンスしやすい設計
- OEM およびインテグレーター向けのカスタマイズ対応
代表的な用途
- ピックアンドプレース
- マシンテンディング
- パレタイジングおよびデパレタイジング
- 物流自動化
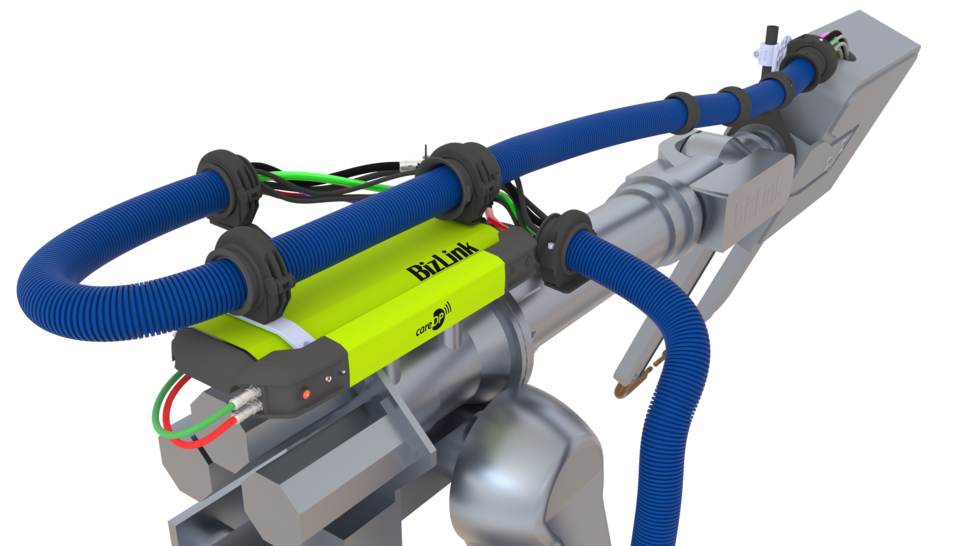
careDP – ロボット用ケーブルマネジメントシステムの状態監視
careDP は、ロボット用ケーブルマネジメントシステムの状態基準監視を可能にします。
以下を早期に検知できます。
- 摩耗の進行
- 重大な負荷状態
- 差し迫ったケーブル故障
メリット
- 予知保全計画
- 予期しないダウンタイムの削減
- システム可視性の向上
- 設備総合効率(OEE)の向上
高柔軟性エネルギー・データケーブル
連続的な動的動作、多軸ねじり、そして要求の厳しいハンドリング環境における長寿命のために設計された高性能ロボットケーブルです。
高いサイクルレートや変動する可搬重量条件下でも、安定した電力伝送と信頼性の高い信号完全性を確保できるよう設計されています。
メリット
- 多軸ロボット動作用の高いねじり耐性
- 動的負荷下でも安定したエネルギー伝送
- ビジョンおよびセンサーシステム向けの信頼性の高いデータ通信
- 連続稼働における長寿命
- ケーブル疲労による予期しないダウンタイムの低減
- 干渉のない信号伝送のための最適化されたシールド
代表的な用途
- 高速ピックアンドプレース
- ビジョンガイド式ハンドリングシステム
- 自動化包装ライン
- 組立セルへの供給
- 柔軟なイントラロジスティクスステーション
ロボット用途向け高耐久媒体ホース
動的なロボット動作および連続的なハンドリングサイクル向けに設計された、堅牢な空圧および真空ホースソリューションです。
安定した媒体供給を維持しながら、摩耗、ねじり、繰り返しの屈曲に耐えられるよう設計されています。
メリット
- 信頼性の高い空圧および真空性能
- 摩耗および機械的負荷への耐性
- 動的動作時でも安定したエアフロー
- 長いメンテナンス間隔
- 漏れリスクの低減
- ロボット用ケーブルマネジメントシステム内でのコンパクトな配索に適した最適化された柔軟性
代表的な用途
- 真空式グリッピングシステム
- 空圧グリッパー
- 包装自動化
- パレタイジングおよびデパレタイジング
- 協働ハンドリングステーション
マテリアルハンドリング FAQ
ハンドリング用途で最も一般的な故障問題は何ですか。
ロボットハンドリング用途で最も一般的な故障箇所は、ケーブル断線、ねじり疲労、ホース摩耗、コネクタ故障、そして高い動的負荷がかかるロボット軸での不十分なストレインリリーフです。これらの問題は、多くの場合、制御されていないケーブル配索、過度に小さい曲げ半径、そして高まるロボット加速プロファイルによって引き起こされます。
ロボットの加速と減速は、ロボットケーブルの寿命にどのような影響を与えますか。
加速および減速の速度が高くなるほど、ケーブルやホースに加わる機械的負荷は大きく増加します。急激な動作変化は、周期的なねじり荷重と屈曲応力を生み出し、材料疲労を加速させます。配索と応力分散を制御するように適切に設計されたロボット用ケーブルマネジメントシステムがなければ、ロボット速度の上昇に伴いケーブル寿命は大幅に低下する可能性があります。
なぜロボット速度が上がるとケーブルマネジメントシステムは故障するのですか。
ロボット速度とサイクルレートが上がるにつれて、ケーブルマネジメントシステムに作用する動的力は指数関数的に増大します。設計の不十分なシステムでは、制御されない動き、ケーブルの跳ね、過度なねじり、または局所的な応力集中が発生する可能性があります。時間の経過とともに、これが絶縁損傷、導体疲労、早期のシステム故障につながります。高速用途では、工学的に設計された配索形状、定義された曲げ半径、そして機械的安定化が必要です。
ロボットハンドリングにおけるケーブル故障はどのように防止できますか。
ロボット専用の高柔軟ケーブル、制御された配索システム、適切なストレインリリーフ、そして careDP のような状態監視ソリューションを使用することで、ケーブル故障は大幅に低減できます。高サイクル環境では、用途に応じたエンジニアリングが極めて重要です。
ロボットハンドリングのパフォーマンスを最適化しましょう
ロボット統合、設備信頼性、オートメーションエンジニアリング、あるいは運用パフォーマンスのいずれをご担当であっても、当社は稼働率を守る高性能なロボットハンドリングシステムの設計を支援します。リスクを低減し、長期的なシステム安定性を確保する方法について、ぜひご相談ください。