産業オートメーション向けロボットねじ締めソリューション

ロボットねじ締めは、自動ねじ締めとも呼ばれ、産業用ロボットが制御されたトルクと高い角度精度でねじを位置決めし、締め付ける締結プロセスです。このプロセスにより、大量生産環境において再現性の高い機械的接合を実現できます。
自動車組立ラインから電子機器製造、家電製品の生産まで、ロボットねじ締めシステムは一貫した締結品質、トレーサビリティ、プロセス制御を提供します。
高いサイクルレート、反力トルク、そして動的なロボット動作は、機械的安定性、ケーブル配線、信号伝送に大きな要求を課します。ねじ締め精度と長期的な生産稼働率を維持するには、信頼性の高いエネルギー供給と制御されたロボットドレスパックシステムが不可欠です。
ロボット向けエネルギー・メディア管理における数十年にわたるグローバルな経験を活かし、BizLink は高サイクルねじ締め用途に最適化されたエンジニアリングケーブル、ロボットドレスパック、監視ソリューションでメーカーを支援します。
ロボットねじ締めとは何ですか?
ロボットねじ締めは、自動化された締結プロセスであり、ロボットがねじ締めツールを事前に定義された座標に位置決めし、制御されたトルクを加えて部品を固定します。
手作業による締結とは異なり、ロボットシステムは以下を提供します。
- 精密なトルク制御
- 一貫した角度監視
- 高い繰り返し精度
- 統合された品質文書化
自動ねじ締めは、トレーサビリティ、構造的信頼性、短いサイクルタイムが求められる用途に特に適しています。
ロボットねじ締めプロセスの仕組み
このプロセスには通常、以下が含まれます。
- 部品の位置決め
- ねじの供給と位置合わせ
- 制御されたトルクと角度の付与
- 締付パラメータの監視
- 締結品質の検証
接合の信頼性は以下に左右されます。
- 安定した TCP 精度
- 制御されたトルク伝達
- 正確なツールアライメント
- 信頼性の高い信号伝送
わずかな位置ずれでも、斜め締め、不十分な予圧、または外観上の損傷につながる可能性があります。
ロボットねじ締めシステムの構成要素
電動式と空圧式ねじ締めツール
ロボット用途では、通常、電動式または空圧式のねじ締めスピンドルが使用されます。
電動ねじ締めツールは、統合されたデータフィードバックにより、精密なトルクおよび角度制御を実現します。安全性が重要でトレーサビリティが求められる生産環境で好まれます。
空圧システムは、基本的なトルク停止で十分な、よりシンプルな用途や高速用途でよく使用されます。
システムの安定性とケーブル配線は、特定のスピンドルタイプとトルクプロファイルに合わせて調整する必要があります。
トルクおよび角度監視
最新のロボットねじ締めシステムでは、トルクベースの停止制御、トルク・角度監視、またはトランスデューサベースの測定システムが使用されます。
トランスデューサベースのシステムは最高レベルの精度を提供し、品質保証とトレーサビリティのために締付曲線を記録できます。
安定した信号伝送と振動を抑えた配線は、信頼性の高い測定データを確保するために不可欠です。
自動ねじ供給システム
ねじ供給システムは、ブロー供給またはピックアンドプレース機構によって、ねじをツールヘッドへ供給します。
信頼性の高い供給により、以下が可能になります。
- サイクル中断の低減
- 位置ずれの防止
- プロセス効率の向上
供給ホースとケーブルの安定した配線・配管により、高サイクル環境での中断のない運用を確保できます。
現代の製造においてロボットねじ締めが重要な理由
自動ねじ締めにより、以下が向上します。
- プロセスの繰り返し精度
- トルクの一貫性
- 文書化とトレーサビリティ
- 生産効率
- 作業者のエルゴノミクス
大量生産では、ロボットねじ締めにより、1シフトあたり数千サイクルにわたって均一な締結品質を確保できます。
ただし、ねじ締めツールは反力トルクや振動を発生させ、ロボットの安定性やロボットドレスパックへの負荷に影響を与えます。制御されたケーブル配線がない場合、長期的な信頼性が損なわれる可能性があります。
ロボットねじ締め用途における重要な品質要因
トルク精度と軸力制御
適切なトルクにより、必要な軸力とねじ締結部の完全性が確保されます。ツールアライメントのばらつき、信号の不安定性、または機械的振動は、ねじ締め品質に影響を与える可能性があります。
反力トルクと機械的安定性
締付中には、反力がロボットアームに作用します。これらの力はねじれや振動を生じさせ、ケーブルや配線・配管システムに負荷を与える可能性があります。エンジニアリングされたドレスパックの安定化により、機械的負荷を低減し、耐久性を向上させます。
TCP 精度とツールアライメント
正確な位置決めにより、斜め締め、ねじ山の損傷、不均一な着座を防ぎます。自動 TCP 検証により、長期的なねじ締め精度を維持できます。
信号および通信の信頼性
ねじ締めシステムには、トルクセンサー、角度監視、品質文書化システムが統合されていることがよくあります。安定した信号伝送は、トレーサブルな締結性能を確保するために不可欠です。
ロボットねじ締めの産業用途
自動車製造
自動ねじ締めは、内装組立、バッテリーシステム、シート取付、ダッシュボード取付、構造締結に使用されます。
電子機器製造
ロボットねじ締めは、制御されたトルクが必要な筐体、プリント基板アセンブリ、精密部品を固定します。
家電製品の生産
ねじ締め用途には、筐体組立、モーター取付、構造補強が含まれます。
Eモビリティとバッテリー生産
高精度ねじ締めにより、バッテリーモジュールおよびバッテリー筐体の安全で信頼性の高い組立を実現します。
ロボットねじ締め用途向け BizLink ソリューション
高柔軟性ロボットケーブル
ロボットねじ締めツールは、締付サイクル中に反力トルクや振動を発生させます。BizLink の高柔軟性ケーブルは、動的なロボット動作における連続的なねじれや曲げに対応するよう設計されており、トルクおよび角度監視システム向けに安定した電力供給と信頼性の高い信号伝送を実現します。
最適化された導体設計と耐久性の高い絶縁材料により、繰り返される締付サイクルや機械的負荷によって生じる疲労を低減します。

エンジニアリングされたロボットドレスパックシステム
締付中には、反力トルクによってロボットアームおよび接続された配線・配管システムにねじり応力が加わります。最適化されたロボットドレスパックソリューションは、ケーブルやホースの動きを安定させ、機械的応力を吸収し、定義された曲げ半径を維持します。
制御された配線・配管により、一貫した正確なツールアライメントが支援され、機械的干渉が低減され、高サイクル締結用途におけるコンポーネントの寿命が延長されます。

BizLink Tube Profile-Line – ねじ締めシステム用供給ホース
自動ねじ締めシステムでは、安定したサイクルタイムと中断のない生産を実現するために、信頼性の高い部品供給が不可欠です。BizLink Tube Profile-Line は、ねじ、リベット、溶接ナットの供給用途で使用される空圧式搬送システム向けに設計されています。
高サイクルのねじ締め環境では、ねじが供給ホース内を高速で移動します。供給不良やサイクル中断を防ぐには、耐摩耗性、寸法安定性、一貫した内部形状が重要です。
これらのカスタマイズされたポリウレタンホースは、高い耐摩耗性、優れた寸法安定性、油類および一般的な産業用媒体への耐性を備えています。シリコーンフリーで塗装工程に適した構造により、厳しい自動車および産業環境に特に適しています。
プロファイル、補強、圧力特性は、低い振動傾向と組み合わせて、特定の供給要件に合わせて調整できます。
BizLink advintec TCP 工具測定
正確なねじ位置決めは、斜め締め、不完全な着座、または目に見える表面損傷を防ぐために不可欠です。BizLink advintec TCP は、生産環境内でロボットのツールセンターポイント(TCP)を自動かつ高精度に検証します。
このシステムは特定のアプリケーションに依存せず、主にロボットツールの形状に依存します。回転対称のロボットツールは特に容易にキャリブレーションできます。複雑なツールや間接的に測定可能なツールでも、補助ピンや定義された基準部品を使用して参照することができます。
測定された偏差をロボットプログラム内で直接補正することにより、BizLink advintec TCP は一貫した正確なねじ位置合わせを支援し、経時的な位置ドリフトを低減し、高サイクル生産環境における締結信頼性を向上させます。

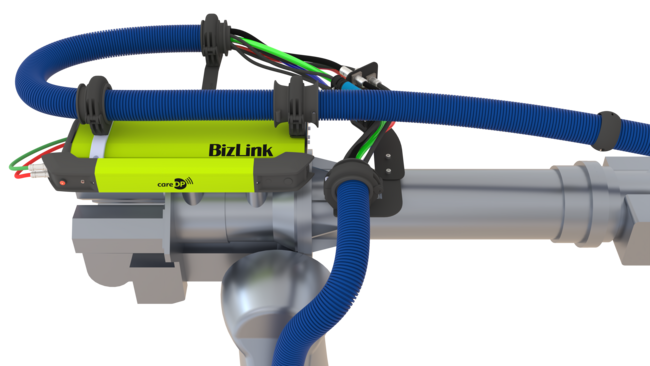
careDP – AI を活用した状態監視
ロボットねじ締め用途では、連続的な締付サイクルと反力トルクにより、ケーブル、ホース、配線・配管システムに継続的な機械的負荷がかかります。careDP はロボットドレスパックの動作挙動を分析し、異常な負荷パターンや摩耗進行の初期兆候を検出します。
予測に基づく知見により、予防保全計画が可能になり、締結作業を中断させる可能性のある予期しない故障の防止に役立ちます。
耐久性の高いケーブル、最適化された供給ホース、制御された配線・配管、インテリジェントな監視を組み合わせることで、BizLink は自動締結システムにおけるねじ位置合わせ精度、供給信頼性、設備総合効率を向上させます。
ねじ締めに関するよくある質問
ロボットねじ締めで最も一般的な不具合にはどのようなものがありますか?
一般的な不具合には、斜め締め、トルク不足、過締め、ツールの位置ずれ、反力トルクによるケーブル疲労などがあります。安定した位置決めと制御された配線により、これらのリスクを低減できます。
反力トルクはロボットシステムにどのような影響を与えますか?
締付時に発生する反力トルクは、ロボットアームとロボットドレスパックに機械的ストレスを加えます。構造化されたケーブル配線がない場合、ねじり力によってケーブル摩耗が加速し、システム寿命が短くなる可能性があります。
自動化システムでねじ締めツールが摩耗する原因は何ですか?
高いサイクルレート、位置ずれ、過度な振動、不安定な配線は、ねじ締めスピンドルの摩耗やケーブル疲労を加速させる可能性があります。適切な機械的安定化により、ツールへの負荷を低減できます。
自動締結においてトルク監視が重要なのはなぜですか?
トルク監視により、適切な軸力とねじ接合部の完全性を確保できます。また、トレーサビリティを実現し、安全性や製品耐久性を損なう可能性のある締付不足や過締めを防ぎます。
TCP のずれはねじ締め品質にどのように影響しますか?
わずかな位置ずれでも、位置ずれ、斜め締め、または着座深さのばらつきを引き起こす可能性があります。自動 TCP 検証により、長期の生産運用にわたって一貫したねじ位置決めを確保できます。
予知保全はねじ締めの稼働率をどのように向上させますか?
機械的ストレスやロボットドレスパックの動作パターンを監視することで、摩耗を早期に検出できます。これにより、高サイクル締結用途における予期しないケーブルや配線の故障を防ぐことができます。
ロボットねじ締めシステムの長期的な信頼性を確保
ロボットねじ締めの性能は、精密なトルク制御、安定した機械的インフラ、そして反力下での制御されたケーブル配線に依存します。
OEM、システムインテグレーター、オートメーションエンジニア、または締結性能を担当する保全管理者のいずれであっても、BizLink は信頼性が高く高性能なロボットねじ締めシステムの設計を支援します。
お客様のねじ締めアプリケーションを一緒に評価し、トルク精度、システム安定性、長期的な生産稼働率を向上させる機会を特定しましょう。